单片机如何通过外部脉冲换算成pwm输出到舵机
时间:10-02
整理:3721RD
点击:
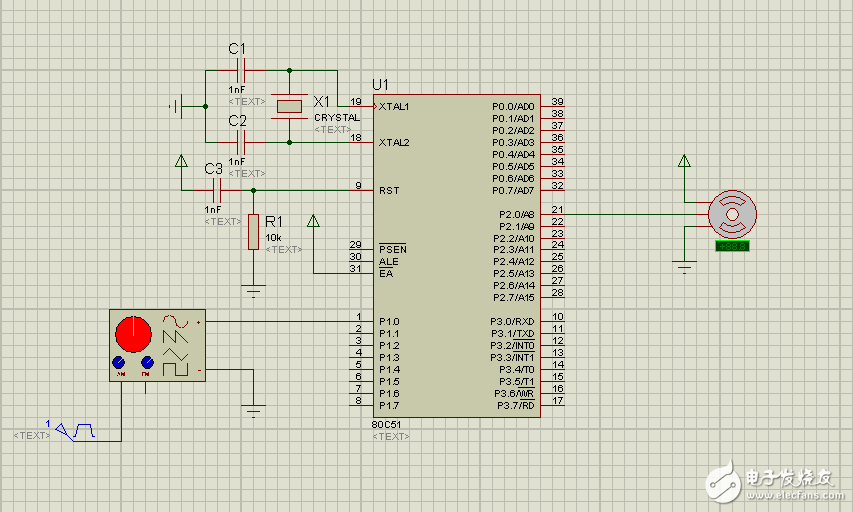
任选一种主控器捕捉外部脉冲信号(信号发生器可由实验室提供)的频率(10k-100kHz),并根据捕捉到的频率进行线性舵机控制,要求脉冲频率达到最大最小时舵机角度为左右极限(360度舵机则分别为左右90度),要求自主设计搭建电路和编写控制驱动程序。(拓展内容:脉冲信号的产生可改为任一一种单片机的外部输出,舵机可根据随机的外部频率自适应调整)
看看