DCDC变换器外部软起动电路设计
0 前言
目前在电子系统中使用了许多Buck降压型变换器,这些变换器集成芯片中,有些使用了外部软起动管脚来设定软起动时间,而有些内部集成的数字或模拟的定时器固定了软起动时间以减小外部管脚的分配降低芯片成本。在一些实际的应用中发现,有外部软起动管脚的芯片有时因为内部软起动电容的放电电路不能及时将软起动电容的电荷放掉,导致系统重起时过流保护电路工作并闭锁,系统不能正常工作;那些具有固定的软起动时间的芯片有时却不能满足一些应用的要求。如在一些工业医疗电子系统应用中,有些电压在上电过程中要求有非常长的软起动延时;在汽车电子系统中,输出电压需要一个超极大电容,从而在电源掉电时或电机抛负载时,保证系统所需要的维持时间;无线上网卡中,输出电压更是需要一个超极大电容,保证功放电路正常的发射工作,这些应用由于输出有大电容,若软起动时间不够,就会在系统的起动中产生问题。
1 电流跟踪型和电压跟踪型软起动电路
对于电流模式的Buck变换器,通常有电压的外环和电流的内环,在电源上电起动的过程中,输出电容短路,因此外环的输出电压误差放大器输出Vref达到工作的最大值。Vref为内环电流反馈信号的参考值,在起动过程中,Vref为越大值,电流也就达到最大值,占空比也达到最大值,这样,芯片就工作在PWM所决定的最大限流值和最大占空比值,大的电流应力和发热会损坏芯片,因此通常电源芯片需要一些保护电路,在起动的过程中,让占空比逐渐的增大,实现系统的软起动。
软起动电路的工作方式有二种类型:电流跟踪型和电压跟踪型。通常电流跟踪型就是在起动的过程中,让Vref的电压随时间的延长缓慢的增加,也就是在ITH管脚加一个电容,在上电的过程中,一个电流源缓慢对电容充电,电容的电压也就缓慢的升高。由于Vref的电压是输入电流的参考值,这样,就限制了起动过程的浪涌电流,同时占空比也逐渐的增大,实现系统的软起动。当起动过程完成后,通过一个电路将电容的电荷放掉,以实现下一次的软起动。
电压跟踪型就是在起动的过程中,让输出误差电压放大器的固定参考电压Vref不起作用,由另外的一个随时间的延长而缓慢增加的参考电压起作用,这样在上电的过程中,Vref的电压为较低的值,从而限制了起动过程的浪涌电流,同时占空比也逐渐的增大,实现系统的软起动。当起动过程完成后,固定的参考电压Vref起作用,系统进入正常的反馈调节,而那个随时间变化的参考电压不再起作用。
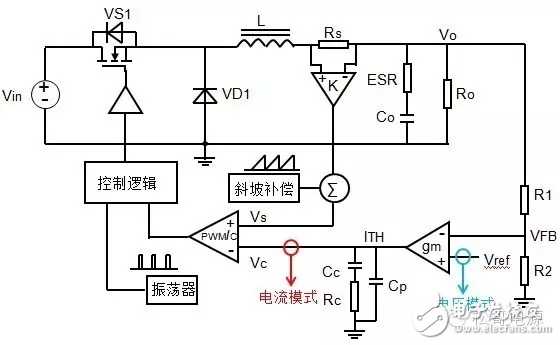
图1:电压和电流模式软起动电路控制节点
上面分析表明:电压跟踪型软起动电路在起动过程中实时跟踪输出电压的变化,因此它比电流跟踪型软起动电路能够更有效的限制浪涌电流。
2 三种电流跟踪型外部软起动电路
一些集成的Buck变换器芯片由于内部集成的数字或模拟的软起动定时器,因此软起动时间不能调节。图2中列出了常用的3种常用的外部软起动电路,这3种常用的软起动电路都是电流跟踪型软起动方式。
在图2(a),在上电的过程中,输入电压通过电阻对电容Cs充电,在瞬态的过程中,Cs相当于短路,二极管D1导通,VTH的电压为二极管D1正向导通压降。随着电容电压的升高,VTH的电压也升高。然后二极管D1反偏关断,软起动过程结束。二极管D1导通将VTH的电压较长的时间箝位在较低的值,从而实现系统上电的软起动。注意到VTH最低工作电压,因此要选用肖特基二极管,从而保证VTH的电压值在较低的水平。此电路中,由于软起动电容Cs没有放电的回路,因此只能在系统输入电源断电后再上电时才能进行软起动。在输出过载或短路保护后,系统重启时,无法提供软起动。
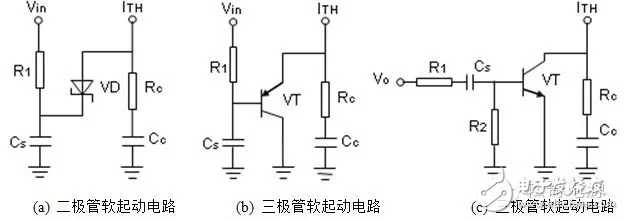
(a) 二极管软起动电路 (b) 三极管软起动电路 (c) 三极管软起动电路
图2:三种电流跟踪型外部软起动电路
图2 (b) 的工作原理和图2(a)类似,由于P型三极管的饱和压降很低,能够提供更为可靠的软起动保护。同样,也只能在系统输入电源断电后再上电时才能进行软起动。在输出过载或短路保护后,系统重启时,无法提供软起动。
图2(c)中,当电源起动时,输出电压上升,电容相当于短路,T导通,VTH的电压被箝位缓慢上升,从而开关电流和输出电压以一定的斜率上升,输出电压上升的时间由Cs的电流控制,Cs的电流由R2和三极管T的VTH确定。输出电压恒定后,Cs不再流过电流,对直流阻断,T关断电路正常工作。上升时间为:
trise=Cs*R2*Vo/Vbe
此电路在输出过载或短路保护后,系统重启时,也能提供软起动,但要注意是的:当输出作大的负载跳变如满载或短路到空载,输出产生的上升沿会触发此电路工作,导致系统复位重新起动,这在系统的要求中是不允许的。
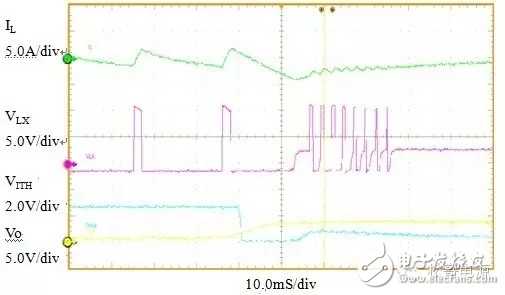
图3:外加软起动波形
图3为外加图2 (c)中的软起动电路的检测波形,C1=100pF,使用的芯片为AOZ1014,不加外部的软起动电路时,软起动的时间为2至3mS,而且输出短路后,当输出短路去除时,电源重新起动,电路无法进入正常的软起动,内部的开关管承受大的起动冲击电流。加了软起动电路后,输出过载或短路保护后重起,输入电流的浪涌很小,而且软起动时间延长到10mS以上。
3 二种电压跟踪型外部软起动电路
图4中列出了2种电压跟踪型软起动电路。在图4(a)中有时此电容用作前馈电容,增加系统的动特性,当用作前馈电容时,其值很小,不大于1nF。若此电容作软起动,其值很大,0.01~10uF。工作原理如下,没有此电容时,输出电压由R1和R2分压后再输入到放大器,在起动过程中,输出电压低,因此,分压后的电压更低,放大器输出高电平。加上此大电容后,在起动过程中,电容瞬态的短路,其导通时间长,因此R1短路,这样输出电压没有经过R1和R2分压,直接加到放大器的输入端,相比而言,放大器输出电平就较低,因此实现软起动。在输出过载或短路保护后,系统重启时,R1可以对Cs放电,也可以提供软起动。由于使用较大的电容才能提供软起动,这将影响系统反馈环,动特性变差。软起动时间为:
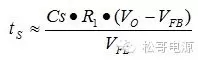
基于上面的公式,可以针对要求的软起动时间选择合适的元件参数。此电路的特点是简单,方便,注意的是应用中要检查系统的动特性在要求的范围。另外当输出电压低时,电容电压变化值小,充电时间短,无法提供有效软起动保护。
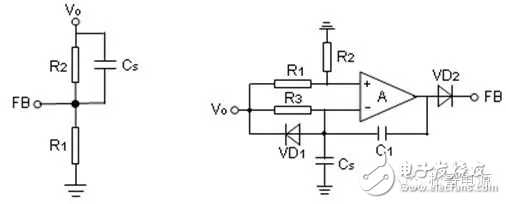
(a) 前馈电容软起动电路 (b) 外部运放软起动
图4:二种电压跟踪型软起动电路
图2-3(b)的电路基于运放的电路可以在各种条件下提供软起动保护,输出电压通过电阻分压器接在运放A的同相端,同时,输出电压通过RC电路接在运放的反相端,输出电压升高时,上电时,反相端由于电容充电短路的影响,同相端的电压大于反相端,运放输出高电压,通过二极管加在FB管脚上,VITH的电压为低电压,在反相端电容充电过程中,VITH的电压一直保持在较低的值,实现软起动。输出电压继续升高,电容继续充电,反相端电压上升,当输出电压快接近正常值后,反相端电压将大于同相端,运放输出低电压,二极管VD2反偏,此电路不再起作用。当输出短路时,并联在R3的二极管VD1对Cs快速放电,从而为复位后下一次的软起动做准备。当输出电压翻转时,运算放大器的同相端和反相端电压相等,所以有:V+=V-,而运算放大器的同相端和反相端的电压,软起动时间分别为:
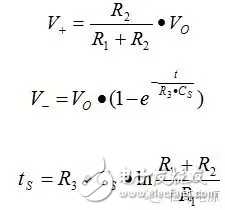
基于上面的公式,可以针对要求的软起动时间选择合适的元件参数。
检测上述电路和实验结果,输入电压12V,输出3.3V/2A,输出电容1000uF,使用AOZ1016作为测试芯片,正常的推荐电路,没有加其它的外部元件,起动波形见图2-4(a)所示,图2-4(b)的波形为加了0.1uF前馈软起动电容后的起动波形。
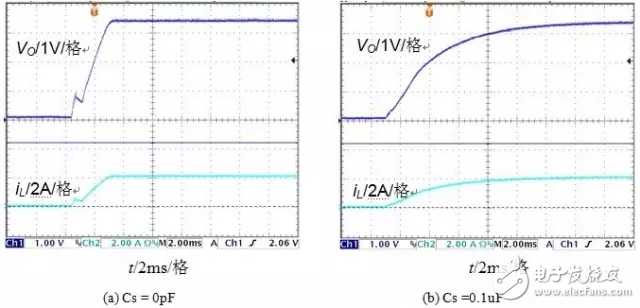
(a)Cs = 0pF (b) Cs =0.1uF
图5:前馈电容软起动电路波形
可以明显的看到,没有加前馈软起动电容时,输出电压波形在上升过程中有一个台阶,同时软起动时间约为3ms,加了0.1uF前馈软起动电容后,输出电压波形在上升过程中没有台阶,软起动时间为约为13ms。通过改变此电容的大小,可以调节软起动的时间。
图6的波形为由外部运放组成的软起动电路的起动波形,其中,R1=3.2k,R2=10k,C3=10pF,R3=5k,Cs分别为0.047uF和0.1uF。从波形可以的看到,输出电压有明显的强烈的软起动过程,输出电压以对数斜率增加,前馈电容软起动电路的输出电压以指数斜率增加。Cs为0.047uF时,软起动时间约为2.6ms,Cs为0.1uF时,软起动时间约为4.6ms,同时输出电压上升的指数斜率值绝对值更小,也就是输出电压上升得更缓。此电路可能通过多个元件来可以调节软起动的时间,灵活性强。
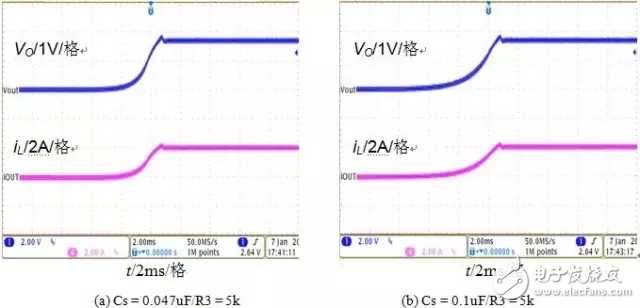
(a) Cs = 0.047uF/R3= 5k (b) Cs =0.1uF/R3 = 5k
图6:外部运放软起动电路波形
谢谢大神的分享。
不错的资料 感谢分享
好文,谢谢分享。