让救援车探测和搬运金属
智能救援车在经过千难万险(避 障、循迹)过程后,接下来的任 务就是寻找救援对象(金属探测), 实施救助(金属转移)。
一、金属探测电路(见图1)
金属探测采用1个LJ12A3-4-Z/BX 型电感式接近开关U9(见图2),其可靠 探测距离为4mm。当探测到金属时, 电感式接近开关输出低电平;当探测不 到金属时,电感式接近开关输出高电 平;单片机根据电感式接近开关输出电 平的高低判断是否检测到金属片。


具体调试方法为:
1.为保证智能救援车金属探测的可靠性,经测试金属探测传感器作如 下调试:金属探测传感器在装车之前 接5V电源,使金属探测传感器距离金 属片4mm时,金属探测传感器必须输出 低电平,最后金属探测传感器距离金 属片的实际距离为3mm,电平测试点 为B1,见《灵活避障 快速循迹》图2; 实际距离如图3所示。 2.当探测到金属片时智能救援车 状态如图4所示。 液晶显示Find Target,4个发光二 极管同时闪亮,蜂鸣器报警提示。
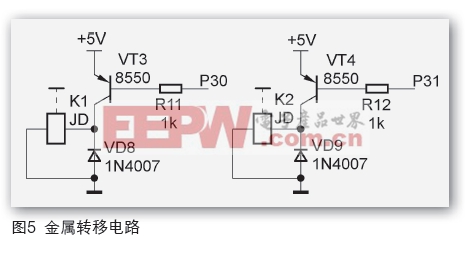
二、金属转移电路(见图5)
1.金属转移电路原理
当检测到金属片时,单片机控制2个 继电器K1、K2吸合,将金属片吸起来。 为保证金属转移的可靠性,金属转 移电路由两个独立的继电器电路组成。 具体电路由继电器K1、K2(5V4123), 吸收二极管VD8、VD9(1N4007),三 极管VT3、VT4(8550),电阻R11、R12 (1kΩ)组成。 改装后的继电器如图6所示。

调试
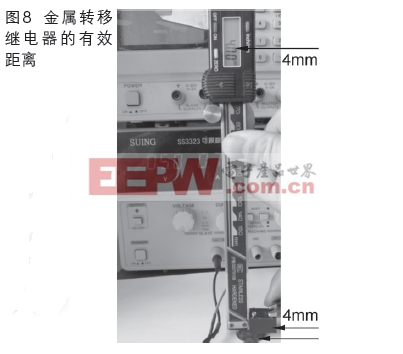
为保证智能救 援车金属转移的可 靠性。2个金属转 移继电器在装车之 前接5V电源,使金 属转移继电器吸合时,距离金属片4mm时,金属转移继 电器必须可靠地吸起金属片,如图7所示;最后金属转移继电器距离金属片 的实际距离为4mm,如图8所示。金属 转移时智能救援车的状态如图9所示。

三、软件流程图
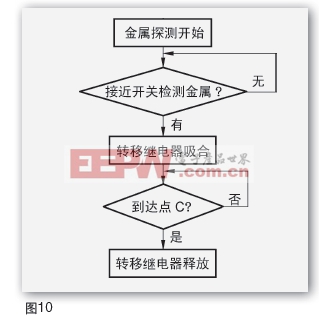
金属探测及转移流程图见图10。 以上为智能救援车的金属探测及 转移电路的制作及调试,这部分电路 比较简单,重点是选择合适的金属探 测传感器及继电器和调试,只要按图 接线一般均可成功。
单片机 51单片机 MCU 单片机视频教程 单片机开发 ARM单片机 AVR单片机 PIC单片机 Atmel stm32 单片机学习 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)