里程、角度、温度测量篇
智能救援车还具有里程、角度、温 度测量的功能。
一、里程电路
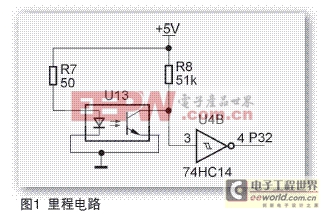
1. 里程电路原理
里程电路见图1,由光电对管U13 (RPR220型)、电阻R7和R8、施密特 反相器U4B(74HC14)与光电编码盘 组成见图2。 光电码盘为24份黑白相间的圆 盘,将其紧贴在车轮的内侧。单片机 通过RPR220型光电对管对光电码盘进 行检测,当检测到黑时输出高电平, 当检测到白时输出低电平,再通过施 密特反相器的整形规矩的方波,供单 片机中断口P3.2口进行计数,单片机通 过计算脉冲的个数就可以计算出智能 救援车前进的里程。
计算方法: 车轮的直径为61mm,车轮的周长 为:L=2×p×R=2×3.14×30.5= 191.54mm 光电码盘被平均分成了24份,每 一份的弧长为: L1=L/24=191.54mm/24=7.98mm? 8mm 假设单片机检测到黑白信号的变 化为n,则小车走过的路程为: S=2n×8mm

2. 调试
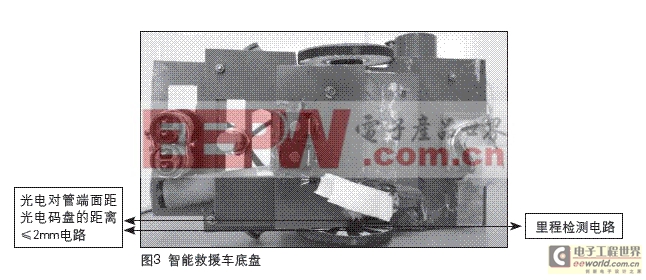
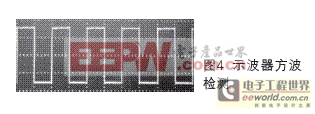
(1) RPR220 型光电对管端面距光 电码盘的距离£ 2mm,如图 3 所示。 ( 2) 光电 码盘转动时用 示波器测 P32 的信号,应为 标准的方波信号 , 如图 4 所示。
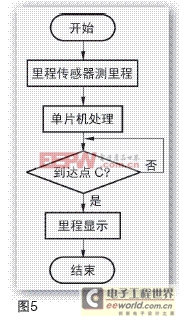
3. 软件流程图
里程显示流程图见图5。源程序可 到www.radio.com.cn上下载。
二、角度测量电路
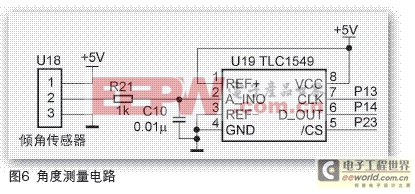
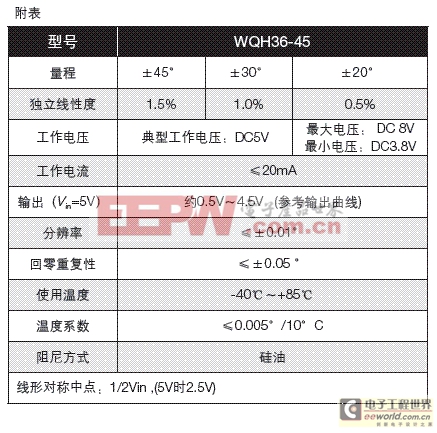
1.角度测量电路原理 角度测量电路见图6,倾角传感器 (U18)采用WQH36-45,其外形见图 7,它是采用高性能磁敏感元件,利用 重力摆结构,可无电接触点的测量倾 斜角度。具有体积小、灵敏度高、寿命 长、抗振动、耐环境污染(耐水,油和 各种恶劣环境)等优点,特别适合用于 运动频繁场合的水平姿态角度的测控 和平面定位等工作场合。本智能智能救 援车的角度测试场地见图8,为倾角为 18°的坡道。说明:接线红接电源+,
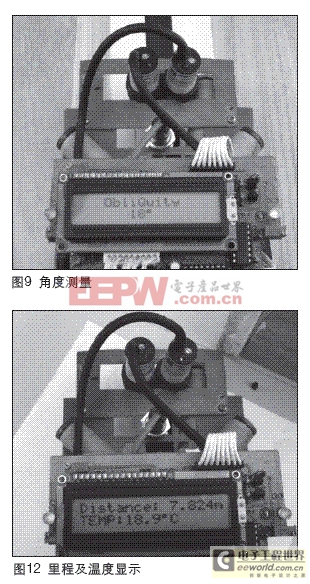
黑接地,黄线接信号输出参数见附表。 倾角传感器采集的角度信息经电 阻R21传输给10位串行AD转换集成电路 U19(TLC1549),经模数转换后供单 片机处理,得到相应的角度,然后用液 晶屏显示,如图9所示。
2. 调试
(1) WQH36-45 倾角传感器在装 车之后应调整到倾角传感器的线性中 性点,方法是加 5V 电压后轻微转动倾 角传感器,用万用表直流电压挡测试 AD 转换芯片 TLC1549 的 2 脚(即电压 输入脚)电压为 2.5V。
(2) WQH36-45 倾角传感器线性 中性点测准后,应扭螺丝固定。
(3) 若电源电压不标准,应调节至 电源电压的一半作为线性中性点电压。
3. 软件流程图
角度显示流程图见图10。源程序 可到www.radio.com.cn上下载。


三、测温电路
1. 测温电路原理
测温电路采见图11,用单总线温 度传感器U17(DS18B20)测量环境温 度,温度传感器的数据线接P3.5,用液 晶显示当前温度值如图12所示。 有关DS18B20的电路原理,《无 线电》上已有多篇文章介绍,这里不 再赘述。
2. 调试
电路板焊好后仔细检查电路板测 温传感器DS18B20的引脚有无焊错的 地方即可。
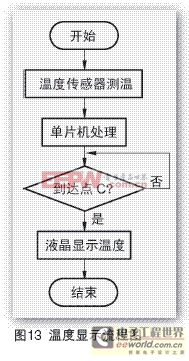
3. 软件流程图
单片机 51单片机 MCU 单片机视频教程 单片机开发 ARM单片机 AVR单片机 PIC单片机 Atmel stm32 单片机学习 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)