CAN-BUS总线在工程机械中的应用
一、前言:
CAN(Controller Area Network)即控制器局域网络。是应用在现场、在微机化测量设备之间实现双向串行多节点数字通讯系统,是一种开放式、数字化、多点通信的底层控制网络。
最早由德国BOSCH公司推出,用于汽车内部测量与执行机构的数据通讯。广泛运用于离散控制领域。CAN协议建立在ISO/OSI模型之上,其模型结构只有三层。协议分为Can2.0A, CAN2.0B,CANopen几种。
目前CAN-bus总线技术在工程机械上的应用越来越普遍。无论是在欧洲、美洲,还是在亚洲,CAN-bus总线技术在工程机械领域都已经普遍应用,国际上一些著名的工程机械大公司如CAT、VOLVO、利勃海尔等都在自己的产品上广泛采用CAN-bus总线技术,大大提高了整机的可靠性、可检测和可维修性,同时提高了智能化水平。而在国内,CAN-bus总线控制系统也开始在工程汽车的控制系统中广泛应用,在工程机械行业中也正在逐步推广应用。本文以高空作业车为例详细介绍控制系统方案; 高空作业车由于控制的点比较分散,并且要求控制系统绝对的稳定可靠,实现精确的控制要求。该系统的控制对象是××××高空作业车,即下车调平、主臂的伸缩、主臂的变幅,曲臂的展收,以及回转等。并能够实现自动展车、收车的功能。CANBUS很好的满足了这些要求,在实际的运用中验证是切实可行的。
二、系统图:
 三、控制系统元件分布图:
三、控制系统元件分布图:
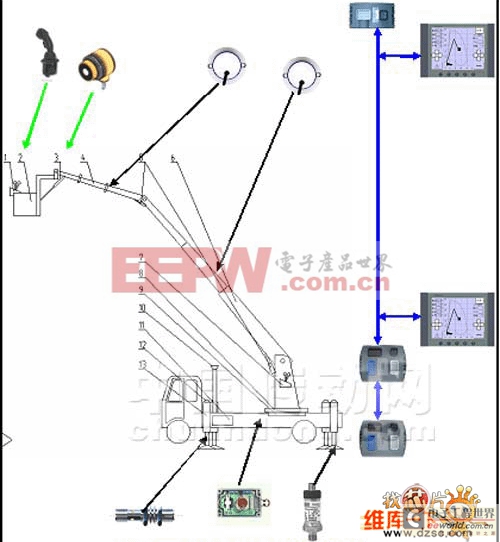 高空作业车控制系统各组成单元大体分布图
高空作业车控制系统各组成单元大体分布图
四、实现功能:
1、工作斗调平
2、变幅控制,伸长控制,幅度限制:
3、底盘调平,手动,自动;
四脚调平的精度根据要求确定,选用不同的调平传感器和元器件。下车调平系统选用SPN-C17模块和倾角传感器,只有下车调平结束以及正确判断出工作模式之后,并将信号通过CANBUS总线传入上车,上车才能动作。
4、转台/工作斗电先导操作(基本手动动作)
主要是手柄的动作等其他的控制动作。
5、能实现工作平台的等幅运动和等高运动
考虑到实际工程中的应用。根据需要可以增加此功能。
6、HMI友好界面显示
可以在HMI上方便调节系统参数。动画显示当前机器状态。
7、动画显示运动轨迹
在显示屏上显示工作斗的运动轨迹,同时界面上会有一个设定轨迹线,当工作斗运动的轨迹超出设定轨迹线。限定相应方向的动作。
8、故障智能显示与诊断
融合以往的经验和电子技术。并根据实际情况限定某些可能引发的危险操作。
9、黑匣子功能
记录历史参数。
10、自动收展车
在判定(程序)或者人为判定可以进行收展车的动作的时候,允许自动收展车。
11、工作斗防碰 通过安装在工作斗上的超声波传感器检测周围故障物.
五、系统特色:
1、采用CAN-BUS总线技术,省线,降低故障率和装配成本,减轻维护成本:
由于高空作业车具有地面转台和高空平台两个操作平台,两个平台都能对上车进行各种动作的控制。这里就有一个上下操作平台的工作人员的协调问题,例如操作的优先级、系统的冗余、动作的安全保证,如果用传统的电气控制,很难实现上下平台的通讯问题,CANBUS的运用很好的解决了这个问题:上下平台通过CANBUS通讯可以实现数据的共享,通过显示终端操作人员可以实时的了解到对方的操作情况,避免了以前那种完全依靠操作人员的经验和相互的协调程度,提高了系统的可靠安全性能,减少了人为因素的不利影响。
2、PID等高级算法的应用; 五、系统硬件组成图:

六、系统软件:
控制器编程采用CoDeSys平台,CoDeSys是一种完善的PLC软件编程工具,它支持IEC1131-3标准IL、ST、FBD、LD、SFC等PLC编程语言,用户可在同一项目中根据需要选择不同的编写主程序、子程序、功能模块等。显示器SPN-2025采用嵌入式系统技术,集成了软硬件于一体的相当于一台486电脑的显示终端,采用VC++编程环境,自由度较高,功能强大。各模块之间通过CANBUS总线连接。
- iCAN系列功能模块在工程机械中的应用(07-27)
- 嵌入式文件系统在工程机械监控器上的移植(10-10)
- 工程机械搅拌设备用称重传感器的选型(05-16)
- 基于PROFIBUS-DP的PLC控制系统在斗轮堆取料机中的应用(08-17)
- CAN总线倾角传感器工程机械应用(09-06)