HEV系统的主要部件:马达与逆变器详解
构成HEV系统的主要部件包括马达、逆变器、电源系统、高电压辅机系统等。车载用马达大多使用交流马达,对小型轻量化、高输出功率、高转速等方面要求严格。逆变器由功率元件、电容和控制电路组成。本文将对二者的特征和性能要求等进行讲解。
混合动力车(HEV)的驱动心脏是马达。首先来看马达的特征。
马达是提供HEV及电动汽车(EV)驱动力的重要部件。乘用车行驶使用的马达一般输出功率为10k~60kW左右。由市售车辆改造而来的EV和小型EV虽然使用直流(DC)马达,但交流(AC)马达仍占主流(表1)。
大量采用永久磁铁型马达


对于HEV用马达,可以列举的性能要求有小型化所需的高输出功率化、高转速化、高电压化、提高燃效所需的高效率化、以及行驶系统的免维护化等。表2分别列出了DC马达和AC马达在要求项目上的利弊。
在支持高电压和维护方面AC马达有利,其中,小型且高效率的永久磁铁型马达得到了大量采用。永久磁铁通过使用钕等稀土类磁铁,实现了大幅的小型化和高输出功率化。

图1:SPM与IPM的转子结构
根据磁铁的配置可以分成表面磁铁型(SPM)与内置磁铁型(IPM)。
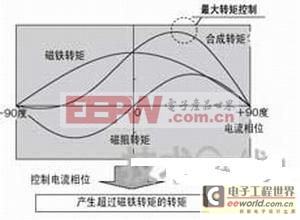
图2:磁阻转矩的利用
HEV大多采用能够使用磁阻转矩的IPM。
永久磁铁型马达可以根据磁铁安装位置的不同分为表面磁铁型(SPM)和内置磁铁型(IPM)(图1)。HEV大多采用的是易于实现高速化,能够利用磁阻转矩的IPM(图2)马达。SPM马达则主要应用于存在振动音问题的电动助力方向盘等方面。但是,当永久磁铁型马达大量使用稀土类磁铁时,成本与稳定供应方面存在课题。
图3:HEV用马达
采用IPM转子。
图3是HEV用马达的实例。虽然在照片上无法判断,但该马达采用的是IPM转子。
逆变器的整体结构与功能
逆变器的作用是利用与主电池的直流电源桥接的6个功率元件,将直流电转换为三相交流电,向马达供电(图4)。在这里,功率元件是指IGBT(绝缘栅型双极晶体管)与二极管(续流二极管)的组合。其控制原理如下。
首先,HEV和ECU根据显示驾驶员油门踏板操作量的油门开度指令计算出所需的驱动转矩,发出IGBT的驱动信号。此时,根据电压相位与转子位置的关系求出的转矩不固定,因此需要以检测转子位置能够获得最大转矩为前提,确定通电的时机。
IGBT的驱动使用PWM(脉宽调制)控制,工作方式是从功率元件输出电压可变的正弦波三相交流电,控制驱动转矩。
3相交流的生成原理
下面来介绍形成可变电压正弦波的3相交流原理。比较图5中相差120度相位的正弦波的电压指令和三角波,形成图4所示的位于U/V/W各相的2个IGBT的开/关信号后,相电压VU/VV/VW会转变为相位相差120度的正弦波状脉冲电压(各脉冲的平均电压变化为正弦波状)。
由于电压指令振幅的改变,脉冲的开/关比将发生变化,电压值随之改变。到此为止,电流只在开时流经马达,关时流经并联的二极管。这样即可向马达通入连续的正弦波电流。另外,提高三角波的频率虽然可以抑制马达电磁噪声和电流纹波,但会增加功率元件的损耗,因此频率通常设定为5k~10kHz。
图4:逆变器的结构
由6个功率元件(IGBT与二极管组合而成)和电容等构成。

图5:三相交流的生成原理
首先比较相位相差120度的正弦波电压指令与三角波,生成IGBT的开/关信号。
- 基于NEC单片机的技术文献及方案汇总,软硬件协同(02-18)
- 变频器搭配同步马达在电梯上的应用(12-19)
- 基于Baby-LIN-RM的马达检测系统(12-16)
- Cerebot MC7马达控制方案(12-16)
- 基于线性马达的驱动控制方案(12-13)
- 马达控制反相器的设计(12-13)