一种自适应波束形成算法实现
片)的速度要慢,无法完成复杂的设计,而且消耗更多的电能。但是他们也有很多的优点比如可以快速成品,可以被修改来改正程序中的错误和更便宜的造价。厂商也可能会提供便宜的但是编辑能力差的FPGA。因为这些芯片有比较差的可编辑能力,所以这些设计的开发是在普通的FPGA上完成的,然后将设计转移到一个类似于ASIC的芯片上。另外一种方法是用CPLD(复杂可编程逻辑器件备)。
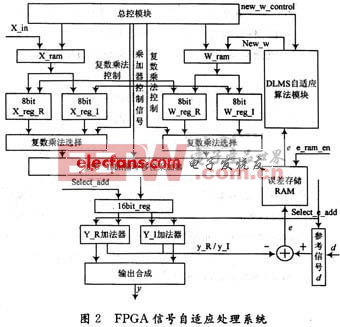
根据数字自适应波束形成的原理和数学模型,本文设计的基于FPGA数字波束形成系统结构如图2所示。8路输入信号x(n)经过前端信号处理,A/D转换后,在总控模块的控制下进入输入数据存储模块双口RAM,自适应波束形成的具体实现步骤如下:
第一步:由式(1)得,实际输入的x(n)和调整后的权值w(n)各分量相乘之后累加得到输出y(n);
第二步:由式(2)得,实际输出的y(n)与期望d(n)相减得到调整误差e(n);
第三步:由式(3)得,延时后的调整误差P(n)跟步长的2倍相乘,再和延时的输入x(n-D)相乘得到的积与延时的权值相加,得到新的权值向量。
第四步:新的权值向量再与新的输入向量循环进行第一到第三步实现自适应。
由此,我们可以将系统分为五大模块:主控模块:主要产生时钟信号,给各模块提供时序信号触发各模块的启动和初始化;双口存储模块(包括输入数据存储模块、权值存储模块、误差信号存储模块等):存储各功能模块所需的数据和参数;自适应权值计算模块,误差计算模块:这两个模块可以合在一起,用于系数更新的白适应算法;空间滤波器乘加模块:完成滤波运算,得到输出结果。2.2.1 控制模块
输入信号和权值是8位的复数数据,通过控制模块选择乘法操作的操作数,两个复数信号相乘的4种组合00,11,01,10可以完成实部和虚部之间4个乘法运算,四种情况控制模块输出的控制信号分别为ST0,ST1,ST2,ST3。
其中,clk_regbt用来控制乘法器完成乘法,counterbt用来控制乘数的位选,clk_reg用来控制运算新数的进入、上次计算的完毕和结果的输出。
2.2.2 存储模块
一种存储模块,它包括:用于根据外部指令/地址信号来产生内部信号的指令/地址寄存器,且所述的指令/地址寄存器件带有一个输出晶体管;被分成第一和第二两组的多个存储器件;用于连接所述的指令/地址寄存器件和所述的存储器件的布线;和用于安装所述的指令/地址寄存器件和所述的存储器件的基板;所述的布线包括:从所述的指令/地址寄存器件延伸至第一个分支结点的第一段布线;从第一个分支结点延伸至第二个分支结点的第二段布线;从第一个分支结点延伸至第三个分支结点的第三段布线;从第二个分支结点分出延伸至所述的第一组存储器件的第四段布线;和从第三个分支结点分出延伸至第二组存储器件的第五段布线;和所述的指令/地址寄存器件包括:阻抗调节器,用于调节从所述的指令/地址寄存器件和第一段布线之间的连接点看去所述的指令/地址寄存器件的输出阻抗,通过调节该阻抗调节器,可使所述的输出阻抗在内部信号的工作电压范围内基本保持不变;和上升时间/下降时间调节器,用于将内部信号的上升时间和下降时间调节至特定值。
存储模块采用8位和16位双口RAM(如图3所示)作为信号数据和权值数据的存入和读取存储器,分别用来存放输入信号x、权值ω和误差e,分别由控制信号clkregbt,clk_regw和clk_rege来控制信号的写入和读出。其中x_ram用来存放输入信号;w_ram存放权值,其输入为系数更新模块的输出,输出为更新后的权值。
2.2.3 自适应处理及复数乘加器模块
数字波束形成器是通过加权因子对空间不同阵元接收信号的加权求和而成的。由于加权因子相当于滤波器系数,而输入的信号为空间位置不同的阵元的接收信号。所以可将数字波束形成器等同于一个空域滤波器来实现。

3 系统仿真与验证
本文设计核心部分是基于Stratix系列EPlS10芯片设计的分别对I/Q两路原始数据进行DLMS自适应算法和复数乘加运算,在QuartusⅡ环境下用VHDL语言编写了各功能模块,并进行了仿真,共占用了2 703个逻辑单元,同时应用Matlab对数字结果进行波形仿真,以下为仿真验证的结果。
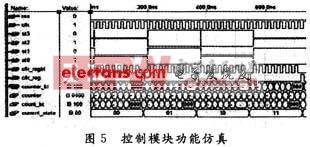
图5为主控模块的仿真波形,其中ST0,ST1,ST2,ST3为复数乘法的4种组合,clk_regbt用来控制乘法器完成乘法,counter_bt用来控制乘数的位选,clk_reg用来控制运算新数的进入、上次计算的完毕和结果的输出。
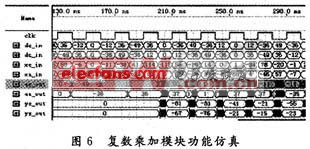
图6为复数乘加模块功能仿真结果,dc_out,ds_out,xc_out,xs_out分别是输入信号和期望信号的实部和虚部,ec_out,es_out,yc_out,ys_out分别为误差和滤波输出的实部和虚部。

图7为系统仿真测试结果:系统预形成波束方向为0&de
- 3DES算法的FPGA高速实现(06-21)
- 基于DSP的Max-Log-MAP算法实现与优化(05-27)
- DSP中DMA操作的无阻塞请求实现(06-18)
- 二维DCT编码的DSP实现与优化(09-08)
- 基于DSP处理器上并行实现ATR算法(01-29)
- 基于DSP的H.324终端设计(05-27)