新型智能化航迹仪的设计与实现
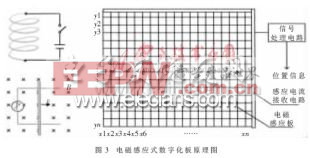
传统航迹仪使用接口板CDT800,其中包括 Am9513计数器与μPD71055I/O接口。CDT800为成品接口板,其计数器Am9513相关资料相对有限,且动态初始化要求严格,在实际应用过程中,对系统资源的占用过大,严重影响系统的实时性。 XC2S50接口板包括FPGA芯片XC2S50、配置芯片18V01、输出驱动芯片SN74LS244及外部接口电路。其原理图见图2。 接口板的主要功能是:接收S3C44B0X主板通过数据总线发送的数据命令信息(包括:X、Y方向的分频值、脉冲个数、运行方向,以及开始/终止运行、抬落笔、报警等),经FPGA芯片XC2S50处理后,转化为相应频率的脉冲信号;再经输出驱动芯片SN74LS244,通过接口HJY传递给X、Y向的步进电机驱动器。 2.4 步进电机及其驱动器 航迹仪控制系统对快速性及定位精度均有很高的要求。考虑到系统是针对数字量及位移的控制系统,因此选用步进电机作为其执行元件。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 系统要求绘笔绘制大量细小折线,这就要求电机工作在低频区且需要频繁地执行起动、停止、调速等操作。因此步进电机极易出现低频振荡,产生工作噪音,影响绘笔的稳定性及标绘精度。 本设计选用RORZE公司生产的5相混合式步进电机M56853D及相应的5相细分步步进电机驱动器RD-0534M。 步进电机M56853D各技术参数: 最大静转矩Mk=8.0kg·cm;电流I=3.5A/相;转子转动惯量Jr=0.240g·cm·S2;步距角(整步时)θb= = 0.72°;容许径向负载10.5kg;容许轴向负载1.5kg;转子齿数Zr=100。 细分驱动器RD-0534M各技术参数: 供电电压 DC18V~40V;细分数选用m=80;最大响应频率fMAX=500kpps,则可获得最大转速nMAX=60000/m=750r/min 改进后航迹仪系统电机步距角变为原系统的1/80,步距分辨率及控制脉冲频率均得到提高。提高后的控制脉冲频率大大超过了自由振动频率f0,从而避免了系统的低频振荡。 2.5 电磁感应式数字化板 传统的航迹仪为开环系统,无检测反馈装置。改进设计中增添了数字化板。这一反馈模块,构成了一套完整的闭环控制系统,增强了稳定性,降低了误差。 数字化板的工作原理:在标绘仪的绘图平板上布上导线形成格栅,把电磁发射线圈安装到绘笔上,此时把线圈圆心和绘笔圆心标定在同一直线上;绘笔在平板上绘图,而线圈不断发射磁场脉冲,导线切割磁场产生感应电流,通过接收电路和信号处理电路得到绘笔在绘图平台上的相对位置(绘笔位置)。数字化板工作原理如图3所示。 3 航迹仪系统的软件设计 3.1 S3C44B0X主板部分的软件设计 操作系统是控制和管理计算机软硬件资源、合理组织计算机工作流程、方便用户的程序集合。航迹仪功能的完成,很大程度上取决于操作系统软件平台的选择和应用程序的编制。 主板软件系统主要由主程序、命令解释部分、底层部分组成。其中,主程序到命令解释部分的调用通过函数shibie( )进行;命令解释部分到底层部分的调用通过函数zxcb( )进行。 3.1.1 主程序 主程序主要对综导台命令和触摸屏命令进行管理、调度。程序执行过程中查询随机命令数和推位命令数这两个变量。变量小于等于零时,没有综导台命令,程序查询触摸屏有无按下及键值,执行响应操作。当两个变量大于零,说明有了综导台命令,就会自动进入跟踪状态。在跟踪状态,不响应触摸屏命令,控制程序只查询有无随机命令及推位命令,转入响应的命令解释程序。 3.1.2 命令解释部分 命令解释部分主要功能:通过函数shibie( )对每一条命令进行识别及格式检查。对于随机命令和推位命令,每从CAN总线上接收一条命令,相应的命令条数加1。每执行完一条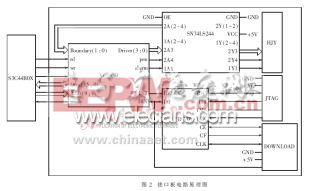
- 3DES算法的FPGA高速实现(06-21)
- 基于DSP的Max-Log-MAP算法实现与优化(05-27)
- DSP中DMA操作的无阻塞请求实现(06-18)
- 二维DCT编码的DSP实现与优化(09-08)
- 基于DSP处理器上并行实现ATR算法(01-29)
- 基于DSP的H.324终端设计(05-27)