基于单片机的波特率变换器设计方案
时间:08-25
来源:互联网
点击:
在一些复杂的系统中,系统与分系统、分系统与设备等之间存在数据的传递问题,往往采用通信的方式来解决。由于分系统、没备等通信波特率的不同,特别是一些特殊波特率设备的存在,使得系统中设备间的相互通信不易实现。例如,在一个系统中,上位机接收某一设备的数据,如图1所示,设备l和设备2采用的是172.8 kbps的波特率,而上位机用VB编程,其通信波特率为115.2 kbps、128 kbps或256 kbps,等,这样设备之间就不能相互通信,给设计带来困难。为了解决上述问题,采用双单片机电路,设计了波特率变换器,将接收波特率为172.8 kbps的数据,转换成波特率为115.2 kbps的输出,从而使不同波特率设备之间的通信成为可能。

1 波特率变换电路
波特率变换电路如图2所示。电路采用2片单片机89C5l作为电路的核心,利用单片机的UART串行口与相关设备通信。单片机u1_L.(接波特率低的设备)与波特率为115.2 kbps的设备通信,单片机U2_H(接波特率高的设备)与波特率为172.8 kbps的设备通信。Ul_I,与U2_H的通信采用并行口方式,以加快Ul_I。与U2_H之间数据传递的速率。U1_L与U2_H的通信可以采用中断查询的方式,也可以采用握手查询的方式进行数据传递。

电路采用2片75176接口驱动芯片组成一个RS-422通信接口。U3和U4组成的通信接口与115.2 kbps的设备相连,U5和U6组成的通信接口与172.8 kbps的设备相连,通信接口采用中断技术。波特率变换器工作原理如下:U1_I。从串行口收到设备的数据后,从Pl口输出数据,并通知U2_H取数,U2_H取到数据后向设备发出数据,同时通知Ul_I.已取走数据,为U1一L下一次输出数据做准备。当U2_H从串行口收到设备的数据后,查询U1_I,是否允许接收数据,如允许接收数据,U2_H从P1口输出数据,并通知Ul_L取数,Ul_L取到数据后向设备发出数据,同时通知U2_H已取走数据,为U2_H下一次输出数据做准备;如Ul_L不允许接收数据,则U2_H暂缓送数。
2 波特率变换器的应用
波特率变换器在应用中,根据使用情况可以分为单向传送和双向传送。两单片机之间的数据传递可以采用中断方式.也可以采用查询方式。如采用查询方式,编程时利用P2口的几位作为查询信号,实现单向或双向传送。
2.1 单向传送
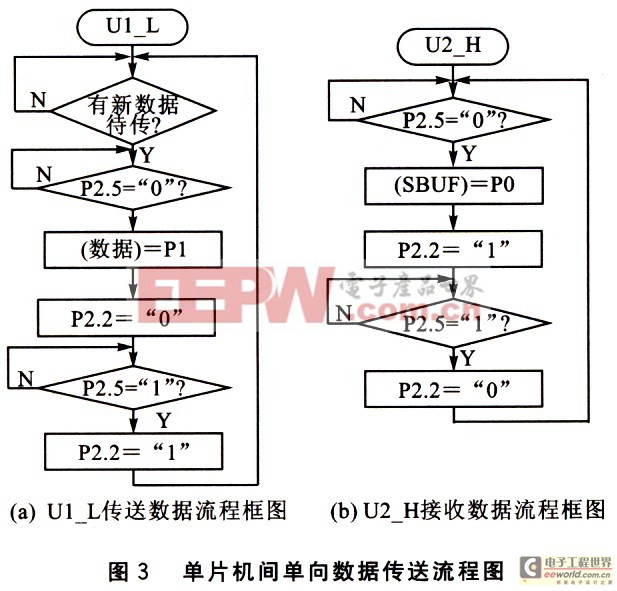
单向传送就是通信口的数据流只向一个方向,即从Ul_L接收到的数据,从U2_H发送出去,或从U2_H接收到的数据,从Ul_L发送出去。用这种方式进行软件编程比较简单。现以U1_L只接收外部设备数据,U2_H只向外部设备发送数据,采用查询方式为例,两单片机之间数据传送的流程图如图3所示。其中Ul_L的P2.2作为向U2_H传送新数据的查询信号(U2_H的P2.5),P2.2=“0”表示有新的数据,P2.2=“1”表示没有新的数据;U2_H的P2.2作为接收U1_L数据的查询信号(U1_L的P2.5),P2.2=“O”表示可以接收新的数据,P2.2=“1”表示不能接收新的数据。如果采用中断方式,两单片机的查询信号更简单,只要Ul_L查询U2_H是否可以接收数据的信号就可以,U2_H无需查询U1_L的查询信号。
2.2 双向传送
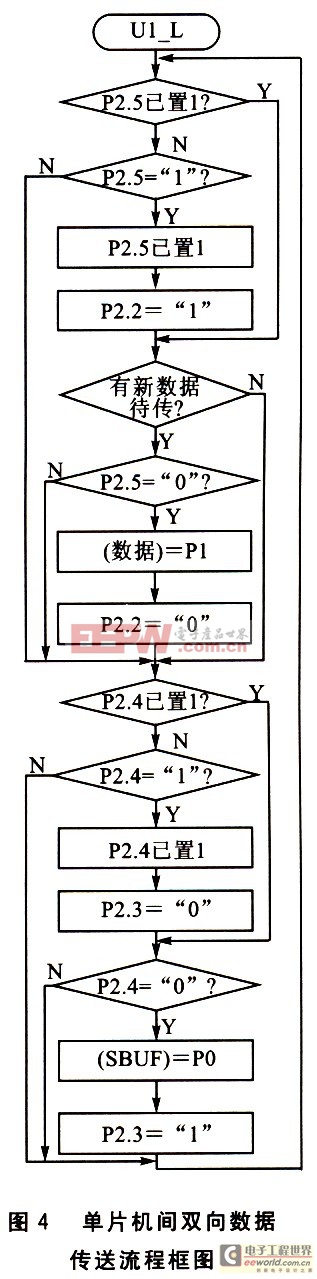
双向传送就是通信口可以同时接收数据和发送数据,数据流是双向的,Ul_L和U2_H既接收数据也发送数据。这种方式软件编程比较复杂,特别是双向传送数据采用查询方式时。单片机之间的查询信号就更加复杂了。现以双向查询方式为例,两单片机之间数据传送的流程图如图4所示,U2_H的流程与U1_L一样。其中U1_L向U2_H传送数据时的查询信号与单向传送的定义一样,U2_H的P2.3作为向U1_L传送新数据的查询信号(U1_L的P2.4),P2.3=“0”表示有新的数据,P2.3=“l”表示没有新的数据;Ul_L的P2.3作为接收U2_H数据的查询信号(U2_H的P2.4),P2.3=“O”表示可以接收新的数据,P2.3=“1”表示不能接收新的数据。如果采用中断方式,查询信号可以减少,编程可以简化。
2.3 应用时的注意事项
两个单片机之间的握手方式如果采用中断,由于U2_H向外部发送数据比U1_L接收外部数据快,Ul_L向U2_H传送数据时,无需考虑U2_H的状态,而U2_H向U1_L传送数据时,由于U2_H接收外部数据比U1_L向外部发送数据快,U2_H必须查询Ul_L的状态,即U1_L是否处于接收U2_H数据的状态,否则,U2_H就不能向Ul_L传送数据。
若作为RS_485通信接口使用,只需对图2中的电路稍做改动,增加对75176芯片的读写控制,同时两个单片机中与主通信设备相连的单片机作为主机,通过P2口的一位来协调两个单片机是接收数据还是发送数据。
值得注意的是,该波特率变换器在不同的应用中会受到一定的限制,在使用时要注意下面几点:
①波特率很高时,要考虑单片机串行口能否实现;
②从波特率高的向波特率低的变换时,要考虑波特率低的单片机能否实现不丢数据的发送;
③当双向变换时,既要考虑上述情况,还有考虑程序的大小,以及执行时间对双向传送数据的影响,计算两个单片机能否实现不丢数据的变换,在时间上要留有余量;
④在查询时,要注意握手信号的关系,不要对同一数据产生重复读取,以至于数据重复;
⑤波特率不同时,单片机可以选用不同的晶振频率。
2.4 实例及源程序
在实际使用中若碰到如图1所示的情况,需要波特率变换器将坡特率为172.8kbps的通信数据转换成波特率为115.2kbps,再向上位机传送。实际使用的电路如图2所示。在该实例中,为了防止局部时刻接收数据比发送快而丢失数据,再U2_H单片机的程序中,加入了8个数据区作为接收数据存放缓冲区。
3 结论
通过长时间的通信实验和实际应用,设计的波特率变换器方案可行,通信可靠,没有出现数据丢失的情况。在一些系统中,由于通信波特率特殊,在设备之间通信存在波特率不匹配时,通过波特率变换器,可以实现不同波特率设备之间的通信。通过更改单片机的晶频振率,可以满足各种波特率(在单片机允许的范围内)的转换。
1 波特率变换电路
波特率变换电路如图2所示。电路采用2片单片机89C5l作为电路的核心,利用单片机的UART串行口与相关设备通信。单片机u1_L.(接波特率低的设备)与波特率为115.2 kbps的设备通信,单片机U2_H(接波特率高的设备)与波特率为172.8 kbps的设备通信。Ul_I,与U2_H的通信采用并行口方式,以加快Ul_I。与U2_H之间数据传递的速率。U1_L与U2_H的通信可以采用中断查询的方式,也可以采用握手查询的方式进行数据传递。
电路采用2片75176接口驱动芯片组成一个RS-422通信接口。U3和U4组成的通信接口与115.2 kbps的设备相连,U5和U6组成的通信接口与172.8 kbps的设备相连,通信接口采用中断技术。波特率变换器工作原理如下:U1_I。从串行口收到设备的数据后,从Pl口输出数据,并通知U2_H取数,U2_H取到数据后向设备发出数据,同时通知Ul_I.已取走数据,为U1一L下一次输出数据做准备。当U2_H从串行口收到设备的数据后,查询U1_I,是否允许接收数据,如允许接收数据,U2_H从P1口输出数据,并通知Ul_L取数,Ul_L取到数据后向设备发出数据,同时通知U2_H已取走数据,为U2_H下一次输出数据做准备;如Ul_L不允许接收数据,则U2_H暂缓送数。
2 波特率变换器的应用
波特率变换器在应用中,根据使用情况可以分为单向传送和双向传送。两单片机之间的数据传递可以采用中断方式.也可以采用查询方式。如采用查询方式,编程时利用P2口的几位作为查询信号,实现单向或双向传送。
2.1 单向传送
单向传送就是通信口的数据流只向一个方向,即从Ul_L接收到的数据,从U2_H发送出去,或从U2_H接收到的数据,从Ul_L发送出去。用这种方式进行软件编程比较简单。现以U1_L只接收外部设备数据,U2_H只向外部设备发送数据,采用查询方式为例,两单片机之间数据传送的流程图如图3所示。其中Ul_L的P2.2作为向U2_H传送新数据的查询信号(U2_H的P2.5),P2.2=“0”表示有新的数据,P2.2=“1”表示没有新的数据;U2_H的P2.2作为接收U1_L数据的查询信号(U1_L的P2.5),P2.2=“O”表示可以接收新的数据,P2.2=“1”表示不能接收新的数据。如果采用中断方式,两单片机的查询信号更简单,只要Ul_L查询U2_H是否可以接收数据的信号就可以,U2_H无需查询U1_L的查询信号。
2.2 双向传送
双向传送就是通信口可以同时接收数据和发送数据,数据流是双向的,Ul_L和U2_H既接收数据也发送数据。这种方式软件编程比较复杂,特别是双向传送数据采用查询方式时。单片机之间的查询信号就更加复杂了。现以双向查询方式为例,两单片机之间数据传送的流程图如图4所示,U2_H的流程与U1_L一样。其中U1_L向U2_H传送数据时的查询信号与单向传送的定义一样,U2_H的P2.3作为向U1_L传送新数据的查询信号(U1_L的P2.4),P2.3=“0”表示有新的数据,P2.3=“l”表示没有新的数据;Ul_L的P2.3作为接收U2_H数据的查询信号(U2_H的P2.4),P2.3=“O”表示可以接收新的数据,P2.3=“1”表示不能接收新的数据。如果采用中断方式,查询信号可以减少,编程可以简化。
2.3 应用时的注意事项
两个单片机之间的握手方式如果采用中断,由于U2_H向外部发送数据比U1_L接收外部数据快,Ul_L向U2_H传送数据时,无需考虑U2_H的状态,而U2_H向U1_L传送数据时,由于U2_H接收外部数据比U1_L向外部发送数据快,U2_H必须查询Ul_L的状态,即U1_L是否处于接收U2_H数据的状态,否则,U2_H就不能向Ul_L传送数据。
若作为RS_485通信接口使用,只需对图2中的电路稍做改动,增加对75176芯片的读写控制,同时两个单片机中与主通信设备相连的单片机作为主机,通过P2口的一位来协调两个单片机是接收数据还是发送数据。
值得注意的是,该波特率变换器在不同的应用中会受到一定的限制,在使用时要注意下面几点:
①波特率很高时,要考虑单片机串行口能否实现;
②从波特率高的向波特率低的变换时,要考虑波特率低的单片机能否实现不丢数据的发送;
③当双向变换时,既要考虑上述情况,还有考虑程序的大小,以及执行时间对双向传送数据的影响,计算两个单片机能否实现不丢数据的变换,在时间上要留有余量;
④在查询时,要注意握手信号的关系,不要对同一数据产生重复读取,以至于数据重复;
⑤波特率不同时,单片机可以选用不同的晶振频率。
2.4 实例及源程序
在实际使用中若碰到如图1所示的情况,需要波特率变换器将坡特率为172.8kbps的通信数据转换成波特率为115.2kbps,再向上位机传送。实际使用的电路如图2所示。在该实例中,为了防止局部时刻接收数据比发送快而丢失数据,再U2_H单片机的程序中,加入了8个数据区作为接收数据存放缓冲区。
3 结论
通过长时间的通信实验和实际应用,设计的波特率变换器方案可行,通信可靠,没有出现数据丢失的情况。在一些系统中,由于通信波特率特殊,在设备之间通信存在波特率不匹配时,通过波特率变换器,可以实现不同波特率设备之间的通信。通过更改单片机的晶频振率,可以满足各种波特率(在单片机允许的范围内)的转换。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)