利用SPMC65P2404A单片机做红外接收
1引言
本系统应用凌阳科技8位工业级单片机SPMC65P2404A做红外接收,SPMC65P2404A单片机的定时、计数器具有CCP(Capture、Compare、PWM)功能,利用其Capture功能可以很方便完成红外接收。
2芯片特性简介
SPMC65系列单片机是凌阳科技公司设计开发的8位工业级通用型单片机,具有超强的抗干扰能力,广泛应用于家用电器、工业控制、仪器仪表等控制领域。SPMC65P2404A单片机功能特点如下:
● SPMC65 CPU ● 中断管理 ● 复位管理 ● 时钟管理 | ● 电源管理 ● 2 通道 16 位定时 / 计数器 (Timer1,Timer3) ● 串行总线接口 |
3系统总体方案介绍
本例以电视遥控器作为红外发射源,简单介绍了如何进行红外遥控接收。主控芯片采用凌阳公司的SPMC65P2404A*28P。
系统框图如图3-1所示。
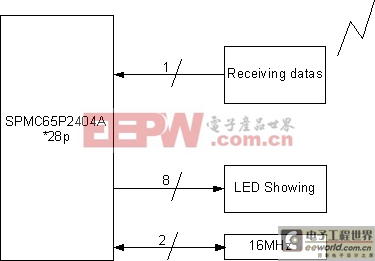
图 3-1系统框图
3.1 红外发送和接收简介
红外通信由红外发送和红外接收两部分组成。
3.1.1红外发送

图 3-2 红外发射框图
编码不能直接通过红外发送器发送,因为发送信号容易受到外界的干扰。为了提高编码的稳定性,必须调制编码,调制好的信号可通过红外发射管发射红外信号。图3-3给出调制的过程,将编好的码和一定频率的信号相叠加形成输出的波形。一定的频率是指接收器件的接收频率。

图 3-4 红外接收框图
红外接收的需先进行解调,解调的过程是通过红外接收管进行接收的。其基本工作过程为:当接收到调制信号时,输出高电平,否则输出为低电平,是调制的逆过程。

图 3-5 解调
3.2 编码格式
本例选用一电视遥控器作为发射源,下图给出其编码格式。

图 3-6 红外编码格式
头脉冲―――发送前的起始位(不占空间)
系统码―――固定数字10H
资料码―――1个字节
资料反码――1个字节
3.3 原理图
如图3-7所示,红外接收管将接收到的信号进行解调,然后由PB1输入,CPU解码,将解码后的数据转换为遥控器按键值,然后显示出来。PA接一个数码管作为显示部分,显示遥控器按键值。本例只接收遥控器上的按键0~9发出的信号。
数码管初始状态为0。
CPU利用捕获功能进行数据解码。
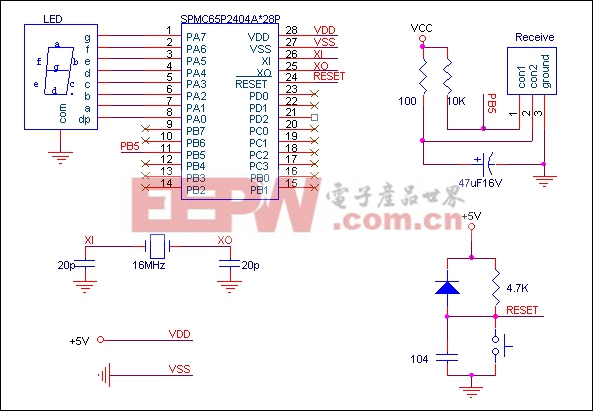
图 3-7 IR系统原理图
4系统软件设计
4.1 主流程
程序主流程如图4-1所示。程序的主循环时间选择4ms。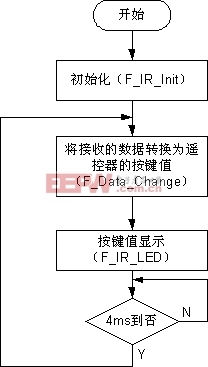
图4-1 键盘主流程图
4.2 数据接收流程图
数据接收流程图如图4-2所示。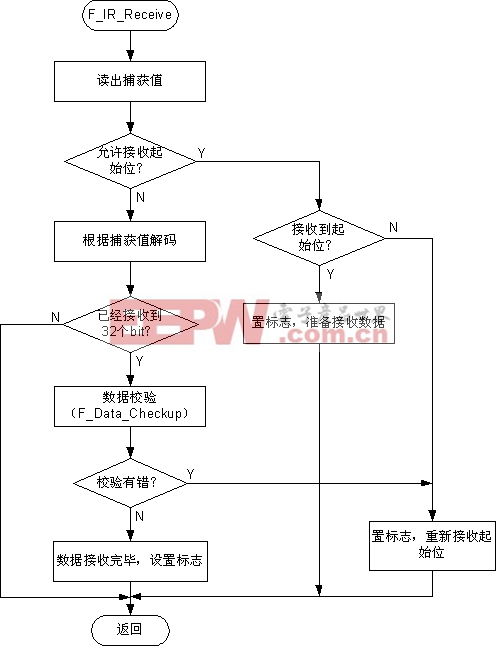
图4-2 数据接收子流程
4.3 数据校验流程图
数据校验流程图如图4-3所示。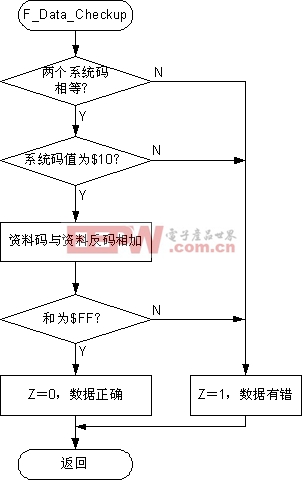
图 4-3 数据校验子流程
4.4 数据转换流程图
数据转换流程图如图4-4所示。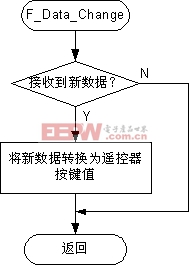
图4-4 数据转换子流程
SPMC65P2404A 红外接收 相关文章:
- 基于SPMC65P2404A单片机的智能IC卡燃气表中的应用(05-09)
- SPMC65P2404A在电动自行车中的应用(10-20)
- SPMC65P2404A在智能测温系统中的应用(10-20)
- SPMC65P2404A单片机在电动跑步机中的应用(10-20)
- SPMC65P2404A在电磁炉中的应用(10-21)
- SPMC65P2404A单片机在智能IC卡燃气表中的应用(03-27)