用P89C51RC+IA和EMP7064S实现转速测量
转速测量是伺服控制系统重要组成部分。迄今为止,测速可分为两大类:模拟电路测速和数字电路测速。微电子技术的发展,数字测速技术的进步,数字测速性能的提高,使数字测速受到人们的重视。
随着微电子技术的发展、计算机技术的成熟,出现了以计算机为核心的数字测速装置。这样的速度测量装置测量范围宽、工作方式灵活多变、适应面广,具有普通数字测速装置不可比拟的优越性。本文应用M/T法测速原理,借助PHILIPS P89C51RC+IA和ALTERAEPM7064S实现转速测量。
1 M/T测量法工作原理
数字测速中用到的关键部件是光电编码器,俗称码盘。码盘是一角度传感器,将角度住处转变成一列脉冲串。刻线数m、刻线误差ε、输出信号的电特性是码盘的主要技术指标。码盘输出两路相差90°的矩形脉冲串,每转动一周输出m个脉冲。通过测量脉冲串的频率即可测量转速。
本文采用M/T法测速。此法需要一个码盘脉冲计数器、一个标准的时间计数器、一个定时器。定时器设定测量时间Ts。在测量时间Ts内,同时对码盘脉冲和标准时间信号计数。测量时间到,产生定时中断,单片机执行中断程序,读出码盘脉冲计数器和标准时间计数的值,由计数值求出转速。
设码盘刻线数为m,码盘脉冲倍频数为n,标准时间为TC(s),码盘脉冲计数值为Cm,标准时间计数值为Ct,则转速ω=360Cm/mnTcCt(°/s)。
2 码盘脉冲预处理的EMP7064S实现
采用码盘的数字测速系统中,对码盘信号的处理包括倍频、输出控制和方向信号的提取。
2.1 码盘脉冲倍频电路
对码盘输出脉冲倍频,相当于增多码盘刻线数,可提高测量准确度,改善测量的动态性能。码盘脉冲计数值的大小影响刻误差的大小。对同一个码盘,输出信号经码盘脉冲倍频电路处理后,频率提高,相同测量时间内对码盘脉冲的计数值大,测量结果中刻线造成的误差小。同时,如果测量时间下限一定,可测的转速下限就低。对码盘脉冲处理最高可得4倍频的脉冲信号。处理电路及时序关系如图1所示。
2.3 方向信号提取电路
当测转速时,不仅要给出速度的大小,还要给出速度的方向。由采用的测量原理可知,测量过程中不能得出方向的信息,转动方向只能通过码盘输出脉冲得到。设顺时针转时,A超前B90°;反之,B超前A90°。根据这一关系可得到方向信号。实现此功能的电路及时序如图3所示。D为不同电平分别代表不同的转动方向。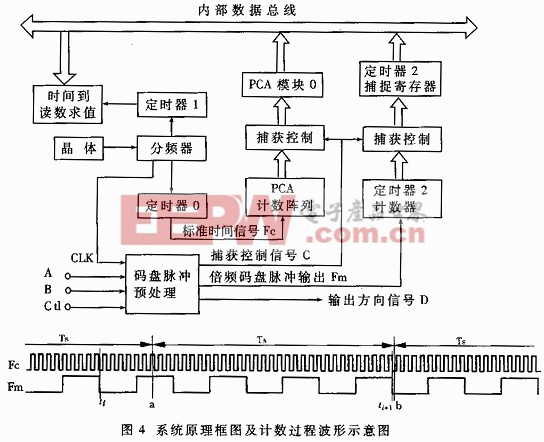
3 测量系统的构成
测量过程中用到一个定时器,一个带捕获功能的码盘脉冲计数器和一个带捕获功能的标准时间计数器。 P89C51RC+IA有三个定时器TIME0~0和一个 PCA可编程计数阵列。其中定时器2和PCA阵列具有计数捕获功能。根据采用的测量方法构成如图4所示的测量框图。由图4可知,定时器2用于码盘脉冲计数,PCA阵列用作标准时间信号计数,定时器1用于定测量时间,这样就构成基本的测量系统。在测量时定测量时间,这样就构成基本的测量系统。在测量时间 Ts内同时对码盘脉冲Fm(倍频后的信号)和标准时间信号计数。定时器1每隔时间Ts就产生一次中断。定时器2和PCA计数阵列都为下降沿捕获。捕获寄存器在a、b时刻的值分别是计数器在ti、ti+1时刻的计数值。设定时器2和PCA阵列捕获寄存器在a、b时刻的值分别为Cti、Cti+1和Cmi、 Cmi+1。则转速为ω=[90(Cmi+1-Cmi)/mTc(Cti+1-Cti)](°/s)。
4 软件设计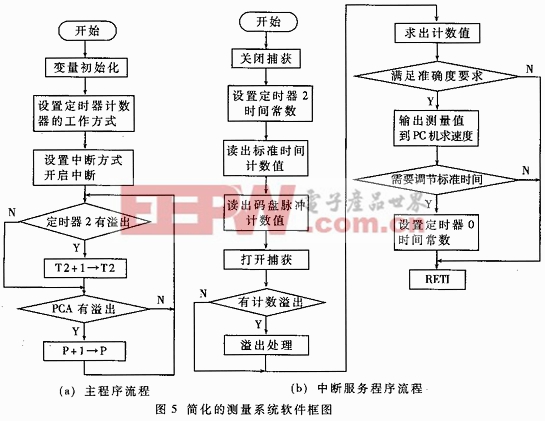
本文介绍了以M/T法为基础,为PHILIPS P89C51RC+IA和ALTERA EMP7064S实现转速测量的数字测量法。由于P89C51RC+IA单片机定时器2、PCA可编程计数器捕获功能的特殊结构及EMP7064S的可编程功能,大大简化了电路设计,提高了系统的可靠性。此仪器被做成PC ISA卡的个人仪器,既可利用PC机的资源,又可简化测量系统。此设计已成功应用于模拟仿真试验转台的速率测量中。
- 单片机在电机转速测量仪应用(11-21)
- 基于51单片机的电机转速测量系统的设计方案(11-19)
- 电机转速测量控制程序(09-18)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)