带8通道12位AD转换器ADuC812及其应用
时间:03-16
来源:互联网
点击:
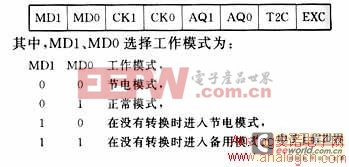
AQ1、AQ0选择ADC采样保持时钟,分频系数从ADC时钟分频产生,AQ1-0为00~11时分别按1、2、4、8分频。
T2C:定时器2溢出触发位,通过置位该位,可使用定时器2的溢出信号作为ADC转换触发信号。
EXC:ADC转换外部触发使能位,通过置位该位,可由外部引脚(CONVST)来触发ADC转换。
(2)ADCCON2控制通道选择和转换模式:

其中,ADCI为中断标志位;DMA为DMA模式使能位;CCONV为连续转换模式使能位;SCONV为单次转换模式使能位;CS3、CS2、CS1、 CS0为通道选择位,用户通过程序指定须进行A/D转换的通道。CS3-0为0000~0111时指示8个通道号,1000时指示温度传感器,1111为 DMA终止信号,其他情况保留。
(3)ADCCON3用于给出ADC状态指示位,只有第7位为BUSY位,其它位保留,BUSY位为只读位,在一个有效的ADC转换或校验周期中,该位为“1”,当转换或校验结束后,该位清“0”。
3.4 D/A转换器
ADuC812包含两个12位的D/A转换器,每个D/A转换器可用于转换12位或8位数据,两个D/A转换器共用一个控制寄存器DACCON,每个转换器还有两个数据寄存器,实现A/D转换的12位数据在寄存器中是右调整,低8位在DACxL寄存器中,高4位在DACxH的低4位中,控制寄存器 DACCON各位
的作用如下所示:

其中,MODE用于控制DAC转换的模式,“1”为8位模式,“0”为12位模式;RNG1、RNG0用于输出范围控制,“1”为0~VDD,“0”为0~VREF;CLR1、 CLR0为输出清除位,“0”使输出强迫为0V,“1”使输出正常;SYNC为两通道输出同步控制位,为“1”时,改写DACxL寄存器,输出即产生变化,要使两通道同步变化,须在SYNC为“0”时,更新两个通道的DACxL/H寄存器,然后使SYNC位置“1”,两通道同步更新输出值;PD1、 PD0为节电模式位,“0”关闭相应通道的D/A转换,“1”打开D/A转换。
D/A转换器的参考电压可由DACCON控制寄存器通过软件选择VREF或VDD,使输出电压范围分别为0~VREF或0~VDD,D/A转换的响应时间小于15μs。
4应 用
基于ADuC812的诸多特点,如果加上必要的外部信号调理电路,就可以构成一个完整实用的数据采集及控制系统,并且系统的硬件结构非常简单。
图1是一个由ADuC812构成的动平衡机测量系统。
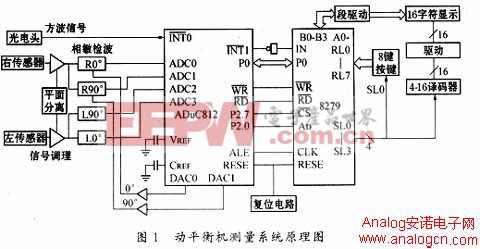

转子在旋转过程中,由于不平衡而产生离心力引起摆架系统振动,动平衡机通过传感器将此机械振动量变成电信号,然后经平面分离、衰减和定标调整、滤波放大等处理电路,最后由
指示仪表进行显示。动平衡机在平衡转子时,转子的任一平面上有不平衡量,必然要在左右两个支承上同时引起振动,振动的大小可以通过左、右两个传感器测量出来,设m1r1和m2r2为左右校正面上的不平衡量,左校正面上的单位不平衡量在左右两端引起的振动分别为αL1和αR1,右校正面上的单位不平衡量在左右两端引起的振动分别为αL2和αR2,左右两端总的振动为VL和VR,如图2所示,则有,

式中,Δ=αL1αR2-αR1αL2是方程组的系数行列式,如果通过分压电路,将右端的振动量取出
经过R00和R900相敏检波,可将右端的振动信号VR在00和900方向上进行分解,设分别为VR0和VR90,而经过L00和L900相敏检波,可将左端的振动信号VL在00和900方向上进行分解,设分别为VL0和VL90,则左右两端的振动的幅值分别为:
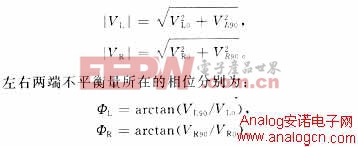
因此,相敏检波后,得到了左右两端两个相位差为90°的分量,对它们进行A/D转换后,由MCU分别计算左右两端的幅值和相角,振动的幅值|VL|和|VR|反映了左右两端振动的大小,通过|VL|和|VR|的计算,可解算出左右两端不平衡量的大小,而振动的相位ΦL和ΦR反映了不平衡量所处的位置,相角的计算可求出不平衡量所在的相位,指示出重点或轻点的相位位置。
转子的转速由外部中断0脚控制定时/计数器0的计时时间来实现,由8051的定时/计数器在工作方式0和方式1的结构可看出,当TCON的TR0位为 1,TMOD的GATE位为1,且T0工作于定时方式时,内部振荡信号经过12分频后给T0提供时钟信号,T0计数与否与外部中断0的电平高低有关,如果 INT0=0,T0不计数,如果INT0=1,T0开始计数,这样就可测量脉冲宽度,通过光电头将转子的转速转换成脉冲信号后再2分频,得到频率为转子旋转频率一半的方波信号,通过方波信号的高电平去控制T0的计数,该数值为转子的旋转周期,由转子的旋转周期可得到转子的转速大小。
- 如何将DSP和MCU两者完美结合(08-10)
- 基于MCU+DSP的运动控制硬件平台设计(10-01)
- 微控制器省电管理方法(05-04)
- 利用低成本的MCU的UART驱动智能卡(05-04)
- DSP结构特点和运算性能(07-19)
- 基于DSP+MCU的列车滚动轴承故障诊断系统设计与应用(10-08)