LIN总线技术在汽车门控系统中的应用
在8位MCU中,可实现标头侦测(HeaderDetection)、指示器(Identifier)和非相关字节过滤(IrrelevantByteFiltering)、延伸性错误侦测(ExtendedErrorDetection)和再同步化(Resynchronisation)等功能。其作用是使从设备的LIN总线功能更有效地发挥。
LINSCI也可以实现更高的精度。LIN总线的波特率(BaudRate)预定标器(Prescaler)一般为8位整型值,分辨率有限,使得很难达成标准SCI位时间取样原则所需要的误差率为2%的准确性。LIN总线波特率一般为10kbps和20kbps,如果按20kbps计算,假设CPU频率为8MHz,由于LIN的频率宽容度为15%,量化错误将达到2.33%。LINSCI的预定标器则以12位无符号(Unsigned)定点值(即Ldiv)代替8位整型值,量化误差则可下降到0.15%。
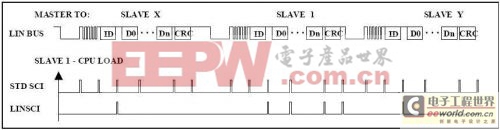
图三 LINSCI数据结构图
实现LIN系统的最优化包含许多方面因素。虽然以标准SCI所建立的LIN网络已具备极佳性能,但LIN数据传输所需要的频宽和CPU负荷,应用上所需的频率准确性,以及LIN界面的稳定和有效性等都是应该考虑的因素。此外,硬件技术上的强化也十分必要。
ST的LINSCI即可通过这些手段实现更高的效率和更低的成本。首先,经过强化的硬件SCI端口减少了CPU负载,相应提高了系统效能。低成本主要由高集成度获得,其内部集成了1MHz震荡器、带有运算放大器的快速10位ADC,以及带有低电压检测器的可配置重启电路,简化了外部电路和系统设计,降低了制造成本。同时,8KB的扩展内存能在单一供给电压下操作,除了提供更快速的编程能力,还降低了电路板的复杂程度。
汽车门控系统架构实例
以汽车门控系统举例。如图四所示,目前中高档车型的门控系统主要包括车门锁(Lock)、防盗门锁(DeadLockLatch)、动力车窗(PowerWindow)、踏脚灯(Footsteplight),及切换面板照明(SwitchPanelIllumination)等。其主节点为一个与车体CAN网络相连的中央车体控制单元(CentralBodyECU),每个车门都有一个车门模块,即按四门的车身则为DM-Driver(司机位置)、DM-Passenger(副驾驶位置)、DM-RearRight(右后门)和DM-RearLeft(左后门)提供门锁和动力车窗等功能;另外两个前门还有MMR和MML左右后视镜控制模块。驾驶端的中央切换面板(CentralSwitchPanel)是一个独立的从节点,控制所有的动力车窗、手动门锁及后视镜等功能。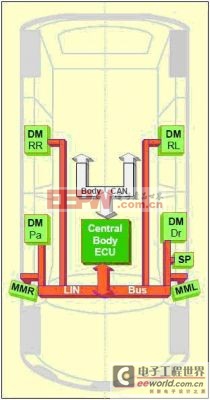
图四 LIN网络门控系统示意图
汽车门控系统的应用场景对LIN网络提出了以下需求:当主控器收到从遥控钥匙发出的有效信号时,必须要启动门控系统,从节点通常通过CAN总线接收;当正确的钥匙打开前门时,也同时启动门控系统;从节点会直接反应而不需经由与主控器的通讯;切换面板的询问动作(Polling)功能,以确保响应对各个驱动装置控制,如动力车窗、后视镜调整、门锁等的主动式切换;对所有从节点的询问功能,以得到车窗升降的位置状态,以及车门的开关情况;以及系统对所有从节点的睡眠模式控制(即电池供应操作模式)等。因此门控系统的MCU也需要与上述功能相符,例如必须针对车窗的升降提供防夹(Anti-Pinch)功能、马达的PWM控制及车窗位置监控;能以SPI接口来控制门锁马达;对于车钥匙的拔出及开门的动作,能够提供电源供应模式的接触式监控,以及对后视镜及切换面板的操控功能等。
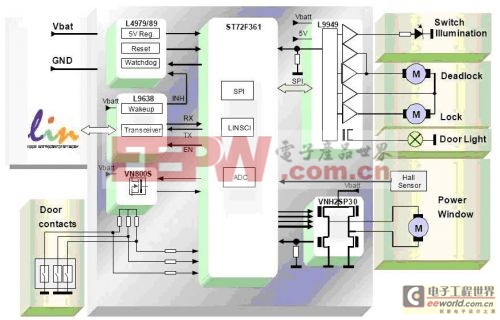
图五 门控模块功能架构图
对上述功能的参数设置上,也有一些需要考虑的因素,例如时序的准确性和动作的实时性等。以手动打开汽车门锁的动作为例,从钥匙插入门锁到打开,需要快速的响应,可接受的延迟必须小于200ms。而在此期间,传动马达大约需要100ms打开门锁,因此留给MCU来完成从低功率模式启动、侦测到钥匙,并触发传动装置等动作的所有时间只有100ms。LIN总线波特率一般为10kbps或20kbps,如果按最快的20kbps计算,为保证数据传输的成功,则CPU的响应时间必须小于1ms。此外,针对系统的安全性(如防夹)和便利性(如门锁侦测)等功能,都会有实时性的要求。
时序的准确性是为了实现正确的运作和流程。车门模块需要一个宽容度小于3%的时间参考,车窗防夹(Anti-Pinch)功能的复杂算法就需要这种准确性。
功耗与节能是对于多数ECU来说是十分关键的因素。以门控系统来说,系统在车辆熄火以后仍需进行间隔性的监控询问动作,会造成电力的持续消耗。而监控的延迟间隔设定很难取舍,因为时间间隔太长,则会造成反应延迟;太短的话,又会增加系统的功耗。
故障安全设计
故障和安全也是系统设计的重点,例如短路时总线线路的故障安全(Fail-Safe)机制。因为LIN总线与车体CAN总线系统相比,不具有容错性能(FaultTole
- SCI接口数据格式(12-05)
- LIN总线在汽车门控系统中的应用(12-19)
- LIN总线协议的应用(12-15)
- LIN总线汽车电子收发方案(12-15)
- LIN总线技术及应用——协议规范(三)(12-13)
- 汽车CAN/LIN总线测试流程和测试工具解析(12-13)