51单片机教程:单片机的中断系统
许寄存器--IE
IE在特殊功能寄存器中,字节地址为A8H,位地址(由低位到高位)分别是A8H-AFH。
IE用来打开或关断各中断源的中断请求,基本格式如下图二所示:

EA:全局中断允许位。EA=0,关闭全部中断;EA=1,打开全局中断控制,在此条件下,由各个中断控制位确定相应中断的打开或关闭。
×:无效位。
ES:串行I/O中断允许位。ES=1,打开串行I/O中断;ES=0,关闭串行I/O中断。
ETl;定时器/计数器1中断允许位。ETl=1,打开T1中断;ETl=O,关闭T1中断。
EXl:外部中断l中断允许位。EXl=1,打开INT1;EXl=0,关闭INT1。
ET0:定时器/计数器0中断允许位。ET0=1,打开T0中断;ET0=0,关闭TO中断。
EXO:外部中断0中断允许位。Ex0=1,打开INT0;EX0=0,关闭INT0.
中断优先寄存器--IP:
IP在特殊功能寄存器中,字节地址为B8H,位地址(由低位到高位)分别是B8H一BFH,IP用来设定各个中断源属于两级中断中的哪一级,IP的基本格式如下图三所示:

×:无效位。
PS:串行I/O中断优先级控制位。PS=1,高优先级;PS=0,低优先级。
PTl:定时器/计数器1中断优先级控制位。PTl=1,高优先级;PTl=0,低优先级。
Pxl:外部中断1中断优先级控制位。Pxl=1,高优先级;PXl=O,低优先级。
PT0:定时器/计数器o中断优先级控制位。PT0=1,高优先级;PTO=0,低优先级。
Px0:外部中断0中断优先级控制位。Px0=1,高优先级;Px0=0,伤优先级。
在MCS-51单片机系列中,高级中断能够打断低级中断以形成中断嵌套;同级中断之间,或低级对高级中断则不能形成中断嵌套。若几个同级中断同时向CPU请求中断响应,则CPU按如下顺序确定响应的先后顺序:
INT0一T0---INT1一T1一RI/T1.
中断的响应过程
若某个中断源通过编程设置,处于被打开的状态,并满足中断响应的条件,而且①当前正在执行的那条指令已被执行完
1、当前末响应同级或高级中断
2、不是在操作IE,IP中断控制寄存器或执行REH指令则单片机响应此中断。
在正常的情况下,从中断请求信号有效开始,到中断得到响应,通常需要3个机器周期到8个机器周期。中断得到响应后,自动清除中断请求标志(对串行I/O端口的中断标志,要用软件清除),将断点即程序计数器之值(PC)压入堆栈(以备恢复用);然后把相应的中断入口地址装入PC,使程序转入到相应的中断服务程序中去执行。
各个中断源在程序存储器中的中断入口地址如下:
中断源 入口地址
INT0(外部中断0) 0003H
TF0(TO中断) 000BH
INT1(外部中断1) 0013H
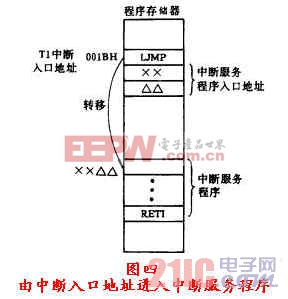
TFl(T1中断) 001BH
RI/TI(串行口中断) 0023H
由于各个中断入口地址相隔甚近,不便于存放各个较长的中断服务程序,故通常在中断入口地址开始的二三个单元中,安排一条转移类指令,以转入到安排在那儿的中断服务程序。以T1中断为例,其过程下如图四所示。
由于5个中断源各有其中断请求标志0,TF0,IEl,TFl以及RI/TI,在中断源满足中断请求的条件下,各标志自动置1,以向CPU请求中断。如果某一中断源提出中断请求后,CPU不能立即响应,只要该中断请求标志不被软件人为清除,中断请求的状态就将一直保持,直到CPU响应了中断为止,对串行口中断而言,这一过程与其它4个中断的不同之处在于;即使CPU响应了中断,其中断标志RI/TI也不会自动清零,必须在中断服务程序中设置清除RI/TI的指令后,才会再一次地提出中断请求。
CPU的现场保护和恢复必须由被响应的相应中断服务程序去完成,当执行RETI中断返回指令后,断点值自动从栈顶2字节弹出,并装入PC寄存器,使CPU继续执行被打断了的程序。
下面给出一个应用定时器中断的实例。
现要求编制一段程序,使P1.0端口线上输出周期为2ms的方波脉冲。设单片机晶振频率
Fosc=6MHZ.
1、方法:利用定时器T0作1ms定时,达到定时值后引起中断,在中断服务程序中,使P1.0的状态取一次反,并再次定时1ms。
2、定时初值:机器周期MC=12/fosc=2us。所以定时lms所需的机器周期个数为500D,亦即0lF4H。设T0为工作方式1(16位方式),则定时初值是(01F4H)求补=FEOCH

串行端口的控制寄存器:
串行端口共有2个控制寄存器SCON和PCON,用以设置串行端口的工作方式、接收/发送的运行状态、接收/发送数据的特征、波特率的大小,以及作为运行的中断标志等。
①串行口控制寄存器SCON
SCON的字节地址是98H,位地址(由低位到高位)分别是98H一9FH。SCON的格式如图五所示。

SMo,SMl:
串行口工作方式控制位。
00--方式0;01--方式1;
10--方式2;11--方式3。
SM2:
仅用于方式2和方式3的多机通讯控制位
发送机SM2=1(要求程控设置)。
当为方式2或方式3时
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)