单片机最小系统组成与I/O输出控制
上保持10ms 以上的高电平,就能使单片机有效的复位。图中所示的复位电阻和电容为经典值,实际制作是可以用同一数量级的电阻和电容代替,读者也可自行计算RC 充电时间或在工作环境实际测量,以确保单片机的复位电路可靠。
3. EA/VPP(31 脚) 的功能和接法
51 单片机的EA/VPP(31 脚) 是内部和外部程序存储器的选择管脚。当EA 保持高电平时,单片机访问内部程序存储器;当EA 保持低电平时,则不管是否有内部程序存储器,只访问外部存储器。
对于现今的绝大部分单片机来说,其内部的程序存储器(一般为flash)容量都很大,因此基本上不需要外接程序存储器,而是直接使用内部的存储器。
在本实验套件中,EA 管脚接到了VCC 上,只使用内部的程序存储器。这一点一定要注意,很多初学者常常将EA 管脚悬空,从而导致程序执行不正常。
4. P0 口外接上拉电阻
51 单片机的P0 端口为开漏输出,内部无上拉电阻(见图3)。所以在当做普通I/O 输出数据时,由于V2 截止,输出级是漏极开路电路,要使“1”信号(即高电平)正常输出,必须外接上拉电阻。
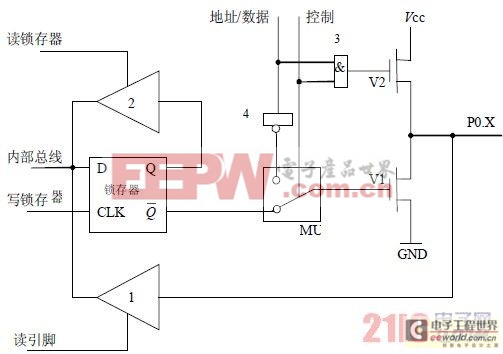
图3 P0端口的1位结构
另外,避免输入时读取数据出错,也需外接上拉电阻。在这里简要的说下其原因:在输入状态下,从锁存器和从引脚上读来的信号一般是一致的,但也有例外。例如,当从内部总线输出低电平后,锁存器Q = 0, Q = 1,场效应管V1 开通,端口线呈低电平状态。此时无论端口线上外接的信号是低电平还是高电平,从引脚读入单片机的信号都是低电平,因而不能正确地读入端口引脚上的信号。又如,当从内部总线输出高电平后,锁存器Q = 1, Q = 0,场效应管V1 截止。如外接引脚信号为低电平, 从引脚上读入的信号就与从锁存器读入的信号不同。所以当P0 口作为通用I/O 接口输入使用时,在输入数据前,应先向P0 口写“1”,此时锁存器的Q 端为“0”,使输出级的两个场效应管V1、V2 均截止,引脚处于悬浮状态,才可作高阻输入。
总结来说:为了能使P0 口在输出时能驱动NMOS 电路和避免输入时读取数据出错,需外接上拉电阻。在本实验套件中采用的是外加一个10K 排阻。此外,51 单片机在对端口P0—P3 的输入操作上,为避免读错,应先向电路中的锁存器写入“1”,使场效应管截止,以避免锁存器为“0”状态时对引脚读入的干扰。
5. LED 驱动电路
细心的读者可能已经发现,在最小系统中,发光二极管(LED)的接法是采取了电源接到二极管正极再经过1K 电阻接到单片机I/O 口上的(见图4 中的接法1)。为什么这么接呢?首先我们要知道LED 的发光工作条件,不同的LED 其额定电压和额定电流不同,一般而言,红或绿颜色的LED 的工作电压为1.7V~2.4V,蓝或白颜色的LED 工作电压为2.7~4.2V, 直径为3mm LED 的工作电流2mA~10mA。在这里采用红色的3mm 的LED。其次,51 单片机(如本实验板中所使用的STC89C52单片机)的I/O 口作为输出口时,拉电流(向外输出电流)的能力是μA 级别,是不足以点亮一个发光二极管的。而灌电流(往内输入电流)的方式可高达20mA,故采用灌电流的方式驱动发光二极管。当然,现今的一些增强型单片机,是采用拉电流输出(接法2)的,只要单片机的输出电流能力足够强即可。另外,图4 中的电阻为1K 阻值,是为了限制电流,让发光二极管的工作电流限定在2mA~10mA。

图4 LED的接法
四、程序设计
在单片机编程语言上,有C 语言和汇编两种选择。本系列教程采用C 语言编写程序,在此对C语言和汇编语言在进行单片机开发时进行下简单比较,汇编语言面向硬件,要求对硬件的特性如寄存器之类的比较熟悉,执行效率高,但可读性和移植性差,不同的单片机之间的程序不能通用,例如学会了51 单片机的汇编指令,却没法用到AVR 单片机上。C语言面向过程,可读性和移植性很好,效率要比汇编低一些。对于刚接触单片机的人来说,学习这两种语言是一样的,但在以后的开发效率上,C 语言的优势就体现出来了,其可以几乎完全不改动的情况下移植,大大提高了开发速度。
控制发光二极管D1 闪烁的C 语言源程序:
1. 程序详细说明
(1)头文件包含。程序接下来调用的P0_0 就是该头文件中定义好的一个寄存器地址。在对单片机内部的寄存器操作之前,应申明其来处,有兴趣的读者可以看看AT89X52.h 文件中的内容。
(2)宏定义led, 便于直观理解也便于程序修改,将P0_0 口命名为led, 这样在程序中就可以用led代替P0_0 口进行操作。
(3)延时函数声明。函数在调用之前必须进行声明,由于函数定义放在主函数之后,所以在主函数之前对延时函数进行了声明。
(4)主函数入口。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)