嵌入式实时操作系统μC/OS-II在S12单片机上的移植
OSIntExit()函数告诉μC/OS-II 时钟节拍中断服务子程序结束了,如果这时有更高优先级的任务进入了就绪态,OSIntExit()就会调用中断级的任务切换函数OSIntCtxSw()做任务切换,以便让更高的优先级的任务运行。以下是函数代码:
void OSTickISR(void)
{
/*根据需要决定是否保存PPAGE 寄存器,此处没有保存*/
OSIntEnter();
MCFLG_MCZF=1; //清除模计数器中断标志位
OSTimeTick();
OSIntExit(); //退出中断并进行任务切换
}
3.2.2 任务堆栈初始化函数OSTaskStkInit()
这个C语言写的函数是与CPU硬件相关的。这个函数初始化任务的堆栈,由建立任务的函数OSTaskCreate()或扩展的建立任务函数OSTaskCreatExit()调用。建立任务的函数带有4个形式参数,扩展的建立任务的函数有8个参数。其中pdata用于向任务传递参数。利用了这个参数将页面寄存器PPAGE 参数传给建立的任务。在改写该函数的时候一定要深刻了解S12CPU在中断发生时各个CPU寄存器的入栈的顺序,否则,μC/OS-II是运行不起来的。中断发生时S12CPU各个寄存器入栈的顺序如图3所示。由于该函数是被建立任务的函数所调用的,所以各个CPU寄存器的初始值并不重要。但要CCR寄存器的内容需要注意:如果选择任务启动后允许中断发生,则所有的任务运行期间中断都允许;同样,如果选择任务启动后禁止中断,则所有的任务都禁止中断发生,而不能有所选择。本文选择在任务启动时开启中断。以下是函数代码:
void *OSTaskStkInit (void (*task)(void *pd), void *pdata, void *ptos, INT16U opt)
{
INT16U *stk;
pt = opt; // 'opt'未使用,此处可防止编译器的警告
stk = (INT16U *)ptos; //载入堆栈指针
*--stk = (INT16U)(pdata); //放置向函数传递的参数pdata
*--stk = (INT16U)(task); //函数返回地址PC
*--stk = (INT16U)(0x1122); //寄存器 Y
*--stk = (INT16U)(0x3344); //寄存器 X
((INT8U *)stk)--; // 寄存器A 仅需要1 个字节
*(INT8U *)stk = (INT8U)(0x55); //寄存器 A
((INT8U *)stk)--; // 寄存器B 仅需要1 个字节
*(INT8U *)stk = (INT8U)(0x66); //寄存器 B
((INT8U *)stk)--; // 寄存器CCR 仅需要1 个字节
*(INT8U *)stk = (INT8U)(0x00); //寄存器 CCR,开中断
return ((void *)stk);
}
3.2.3 让优先级最高的就绪态任务开始运行OSStartHightRdy()
OSStartHighRdy()是在多任务启动时被OSStart()调用的,μC/OS-II 做完所有的初始化工作之后,OSStart()就启动运行多任务,而OSStart()调用OSStartHighRdy()函数运行多个就绪任务中优先级最高的任务。注意,堆栈指针总是储存在任务控制块的开头。
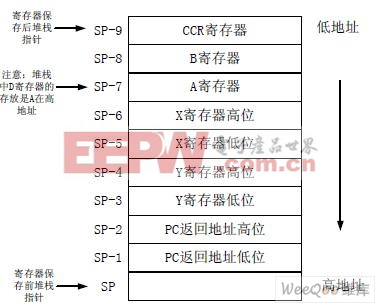
图3 中断发生时S12CPU寄存器入栈的顺序
OSStartHighRdy()将CPU 的堆栈指针SP 的值,改成优先级最高的就绪态任务的堆栈指针的值,然后将该任务的状态字由非运行态“FALSE”,改为运行态“TRUE”,然后执行中断返回指令RTI 以开始运行这个任务。以下是详细代码:
void OSStartHighRdy(void)
{
OSTaskSwHook(); //调用钩子函数
asm{
ldx OSTCBCur // 加载OSTCBCur 的地址到 x
lds 0,x //把OSTCBStrPtr 载入堆栈指针 sp
ldaa OSRunning
inca // SRunning = TRUE
staa OSRunning
rti
}
}
3.2.4 任务级任务切换函数OSCtxSw()和中断级任务切换函数OSIntCtxSw()
任务级的切换是通过执行软中断指令来实现的。OSCtxSw()实际上就是软中断服务子程序,软中断服务子程序的向量地址指向OSCtxSw()。如果当前任务调用μC/OS-II提供的功能函数,并使更高优先级任务进入了就绪状态,则μC/OS-II 就会借助上面提到的向量地址找到OSCtxSw()。在系统服务调用的最后,μC/OS-II 会调用任务调度函数OSSched(),并由此推断出当前任务不再是需要运行的最重要的任务。
OSIntCtxSw()函数中的绝大多数代码同OS_TASK_SW()函数是一样的。而中断退出函数则是通过函数OSIntCtxSw()来从ISR 中执行切换功能,区别只是因为ISR 已经保存了CPU 的寄存器,而不再需要在OSIntCtxSw()函数中保存CPU 的寄存器。以下只给出任务级任务切换函数OSCtxSw()的代码:
void OSCtxSw(void)
{
asm{
ldx OSTCBCur // 加载当前任务的堆栈指针
sts 0,x // 保存到当前任务的TCB 中
}
OSTaskSwHook(); //调用钩子函数
STCBCur = OSTCBHighRdy; // 改变任务的 OSTCBCur 和OSPrioCur
SPrioCur = OSPrioHighRdy;
asm{
ldx OSTCBCur // 得到新任务的堆栈指针
lds 0,x // 加载新任务的堆栈指针到 sp
rti
}
}
4 移植代码的测试
为了验证移植结果是否正确,对移植后μC/OS-II 代码进行了测试,这是移植中很重要的一个环节。首先
单片 机上 移植 S12 C OS-II 实时 操作系统 嵌入式 相关文章:
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 巴西的新电视机顶盒采用意法半导体(ST)的最先进的解码器技术(03-24)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)