工程师STM32单片机学习手记(3):修修改改玩串口
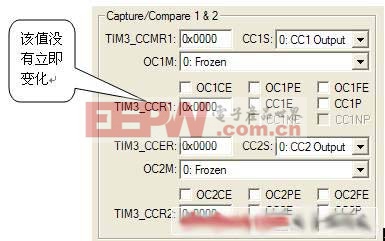
高时几乎全亮,亮度低时一阵狂闪。而TIM2_CH4则效果十分明显,达到了预计的要求。TIM2_CH3(439.4)呢,则介于两者之间,可以看出渐亮和渐灭的效果,但是也有很明显的闪烁效应。但在示波器(传统示波器)上,却是TIM2_CH3的效果最好,逐渐伸缩的PWM波形看得清清楚楚。 接下来就要研究TIM的PWM方式了,用PWM方式来实现同样的功能,应该很有趣。 一、用PWM的方法实现荧火虫灯 上次提到要用Timer的PWM功能来实现荧火虫灯。当然还是找一个现成的例子来作个修改,这回要用到的例子在这里。 复制一份到自己练习用的文件夹中,建立工程。 先阅读readme.txt及源程序,了解一些基本信息。 从程序中可以知道: (1) 使用TIM3 (2) 定时器的时钟频率是36MHz. (3) PWM信号的频率是36KHz,这是通过TIM3的ARR来设置的。ARR的值是999,因此PWM的频率是36MHz/(999+1)=36KHz。 (4) 四个通道的占空比分别由TIM3_CCR1~TIM3_CCR4来确定,算式是: (TIM3_CCR1/ TIM3_ARR)* 100 由此,当PWM的频率是36K时,占空比分辨率接近0.1%。降低频率,可以获得更高的分辨率。 要完成灯的渐亮和渐灭控制,只要定时改变TIM3_CCR1的值就行了。 如何改变呢?这里用到STM32提供的系统定时器(SysTick) 数据手册中关于这个定时器的描述如下: ------------------------------------------------------------- 这个定时器是专用于实时操作系统,也可当成一个标准的递减计数器。它具有下述特性: ● 24位的递减计数器 ● 自动重加载功能 ● 当计数器为0时能产生一个可屏蔽系统中断 ● 可编程时钟源 而它的使用方法可以在库提供的例子中找到。 有一个初始化函数: void SysTick_Configuration(void) { if (SysTick_Config((SystemFrequency) / 10)) //经实际测试发现,除以10是100ms,除以100是10ms,依此类推 { /* Capture error */ while (1); } NVIC_SetPriority(SysTick_IRQn, 0x0); } 这里将其初始化为每100ms产生一次中断。 将这个函数放在main.c中,在main函数中调用它,即完成初始化工作。在system32_it.c中有中断处理函数。 void SysTick_Handler(void) {} 原例子中这里没有写代码,可以根据需要自行增加相关代码来处理每100ms时间到的事件。 代码如下: extern uint16_t dutyRatio; extern uint8_t ChangDuty; void SysTick_Handler(void) { static uint8_t Counter; if(Counter》16) dutyRatio-=62; else { dutyRatio+=62; if(dutyRatio》999) dutyRatio=999; } if(++Counter》=32) Counter=0; ChangDuty=1; } 这里定义了两个变量,一个是dutyRatio,用来控制占空比的变化。它在main.c中定义,并初始化为6。初始化TIM3_CH1通道时使用该变量。 每次中断则视情况增加或者减少,每次变化的量是62。在SysTick_Handler函数中,定义了一个static型的变量Counter,它的值在 0~31之间变化。当其值在0~15之间时,dutyRatio每次加1,这样一共是加16次,即其最终的值是:6+16*62=998,正好比ARR的值小1。当Counter的值在16~31之间变化时,dutyRatio每次减62。这样,dutyRatio的值始终在6~998之间变化,对应的是占空比在: 6/999*100%=0.6% ~ 998/999*100%=99.89% 之间变化。 ChangDuty是一个标志,用途是通知main函数,占空比已发生变化,要求更新CCR1。Mina函数的处理如下: while (1) { if(ChangDuty==1) { TIM3-》CCR1=dutyRatio; ChangDuty=0; } } 在用软件仿真时,执行到TIM3-》CCR1=dutyRatio;时,外围部件中的相应值并没有立即变化。目前还没有弄清楚是调试器的问题还是确实不立即发生变化。 使用硬件来测试,由于我手边的板子TIM3_CH1上没有接LED,所以就看不出灯亮的效果了,不过,不要紧,还有示波器。将程序下载入FLASH后运行,观察GPIOA.6,可以看到非常漂亮的波形。用万用表电压档测该引脚的电压,可以看到电压平稳地上升和下降。所以,我有些怀疑上面提到的那个CCR1没有立即变化仅仅只是调试器的问题。//蓝色的字这个不对,下面有说明。 有了PWM,自然就可以用PWM的方法生成正弦波了。下面生成500Hz正弦波的方法参考自张明峰的《PIC单片机入门与实践》 每个正弦波分成四个像限,每个像限16点,共64点,每点出现2个PWM周期,故PWM的周期为:2ms/128=156.25us,频率为64KHz。 TIM3 Frequency = TIM3 counter clock/(ARR + 1) 倒过来: ARR=TIM3 Counter Clock/TIM3 Frequenc - 1 =562.5-1 =561 如果取ARR的值是561的话,那么实际的频率是64.056
STM32学习笔记——用PWM做个正弦波发生器

系统时基定时器
二、用PWM生成正弦波
修修 改改 串口 手记 学习 STM32 单片机 工程师 相关文章:
- Windows CE下驱动开发基础(11-14)
- 基于WinCE6.0的LPC3250串口驱动程序开发(01-05)
- 嵌入式系统 Boot Loader 技术内幕(3)(03-20)
- 基于计算机串口DSP程序加载的实现(04-10)
- 基于嵌入式WinCE与MSP430单片机多串口通信设计(07-10)
- 基于μC/OS-II和TCP/IP协议的多串口服务器(08-23)