基于模糊控制的恒流源设计
0 引言
各种电子设备中,电源都是关键的部件,其性能影响着整个设备的性能指标。应用中大多数是电压源,但工业上为了避免传输线路的电阻和电磁干扰,通常都采用电流源作为通信信号。在激光应用领域,半导体激光器是一种电流型驱动器件,其电源为恒流源,电流源性能的好坏直接影响到整个激光器装置的技术指标。为了使电流源的性能更好,充分发挥智能控制的作用,提出了一种基于模糊控制的恒流源,通过模糊算法的控制使恒流源的性能更好,以满足现代电子设备对恒流源越来越苛刻的要求。
1 总体方案概述
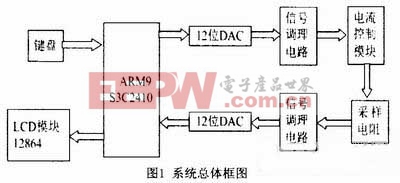
本设计采用三星公司的嵌入式ARM9 S3C2410处理器作为恒流源的控制和电流检测核心,实现了20~2000mA的高精度模糊控制恒流源,如图1所示。在处理器中运用模糊控制算法实现对于恒流源的实时控制,电流测量采用无温度漂的康锰铜电阻丝作为取样电阻,利用S3C2410外扩的A/D输入口进行电流检测和监控。硬件电路恒流控制部分采用精密运算放大器构成闭环反馈控制。电源部分采用大功率变压器供电,多级电容滤除纹波干扰;电源输出采用稳压芯片进行稳压。
2 控制原理与控制器设计
2.1 模糊控制
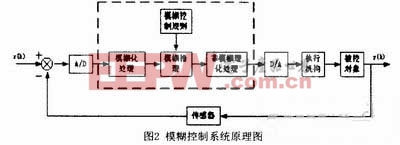
模糊控制属于智能控制的一种,自1965年模糊控制被创建以来,模糊控制理论及其应用得到了迅速发展。模糊控制是以模糊集合理论、模糊语言变量及模糊推理为基础的一种智能控制。模糊控制对数学模型的依赖性弱,不需要建立过程的精确数学模型,并具有良好的鲁棒性和适应性。模糊控制系统的原理如图2所示。
2.2 模糊控制器的设计
模糊控制器首先要根据输入输出变量的数量确定系统的基本结构和模糊推理类型,然后确定各个变量的取值区间即论域。其次根据专家经验划分各变量的模糊子集并确定各子集的隶属函数,其中模糊子集的划分要使相邻子集隶属函数相交点处隶属度为0.2~0.5左右。最后建立模糊控制规则,即根据输入量的模糊子集确定输出量的模糊子集。
2.2.1 选择模糊系统的结构及其逻辑算法
模糊控制器选用采样电压的偏差e和偏差变化率ec作为输入量,因此该模糊控制器为二维模糊控制器。模糊推理类型主要有两种:Mamd ani和Sugeno,两者的主要差别在输出量的类型上,Mamdani是以模糊子集的形式输出,而Sugeno则采用具体的函数形式输出。结合本系统的特点,模糊控制器的推理选用Mamdani推理。
2.2.2 输入输出变量的论域、模糊子集和隶属函数
采样电压最大值为2V,所以其模糊集上的论域e,ec={-2,2}。根据专家经验选取其模糊子集e={-2,-1.5,-1,0,1,1.5,2),记为{NB,NM,NS,Z,PS,PM,PB};ec={-2,-1.5,-1,0,1,1.5,2},记为{NB,NM,NS,Z,PS,PM,PB};
2.2.3 建立模糊规则
为了便于模糊规则在微处理器的实现,可以利用matlabi进行辅助设计。运用matlab的模糊工具箱构建模糊控制器的推理过程,并把所对应的模糊推理表的数据记录下来,在微处理器中模糊推理使用。输出变量和输出变量之间的整体相关情况如图3所示。
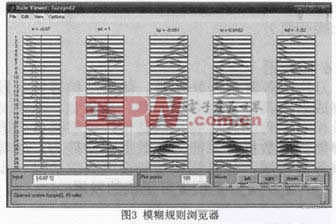
根据matlab生成的数据得到模糊推理表,如表1所示。在S3C2410处理器中构建该表用作模糊推理。

2.2.4 电流测量采样电路的设计
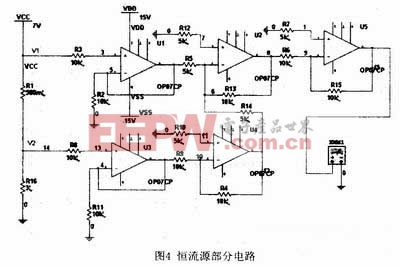
恒流源的输出电流值由图4中的康锰铜电阻丝R2决定,通过测量康锰铜电阻丝的两端电压来测量恒流源的输出电流。
3 电路的硬件设计
3.1 电源电路
在本系统中,设计输出最大电流2000mA,且对纹波的要求非常高,电源部分的电路图如图5所示。220V交流经过变压器后,输出约±20V交流电压,再进行整流、滤波。采用三端稳压集成电路驱动达林顿管,使电源输出电流能达到2000mA,以达到设计指标。
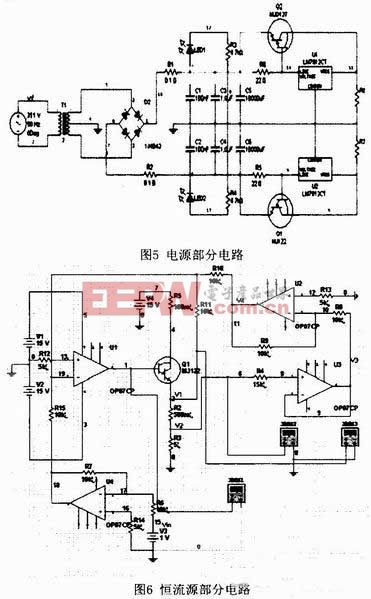
3.2 恒流源电路的设计
恒流源电路如图6所示。其中,由运算放大器输出的电流较小,该电路加了扩流电路。采用达林顿管作为运算放大器的扩流器件。运用放大器构成反馈电路,形成闭环。
4 系统主程序的设计
软件系统的任务主要有A/D转换、D/A转换、步进加减、键盘扫描、模糊算法的执行等功能。为将所有任务有序地组织起来,软件系统采用前后台结构。
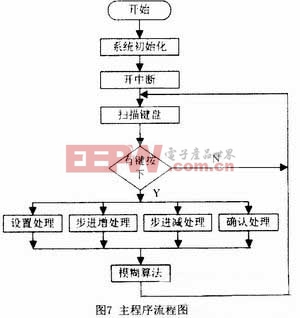
对于结构复杂的模糊算法和对时间没有实时要求的任务如键盘扫描、液晶显示都放在主循环中。A/D、D/A转换任务需要定周期运行,放在时基中断服务子程序中运行,有效地保证了重要任务能及时被执行。
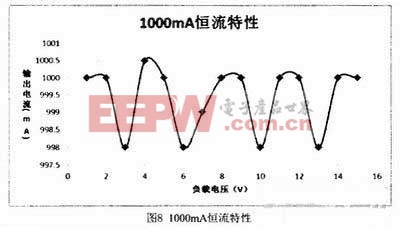
5 结论
根据实际系统测试,给定电流在1000mA,在负载电压变化时,如图8所示,输出电流变化绝对值较小,恒流特性非常理想。
- 基于DSP的无刷直流电动机的模糊控制系统研究(03-16)
- 基于嵌入式Linux的移动机器人控制系统(09-09)
- 基于FPGA的模糊控制交通灯控制方案设计(06-05)
- 基于现场总路线的模糊控制系统(12-13)
- 模糊控制算法子程序(11-23)
- 单片机中实现模糊控制PID程序(11-18)