单片机试验8X8 LED点阵显示技术
1 实验任务
在8X8 LED点阵上显示柱形,让其先从左到右平滑移动三次,其次从右到左平滑移动三次,再次从上到下平滑移动三次,最后从下到上平滑移动三次,如此循环下去。
2 电路原理图
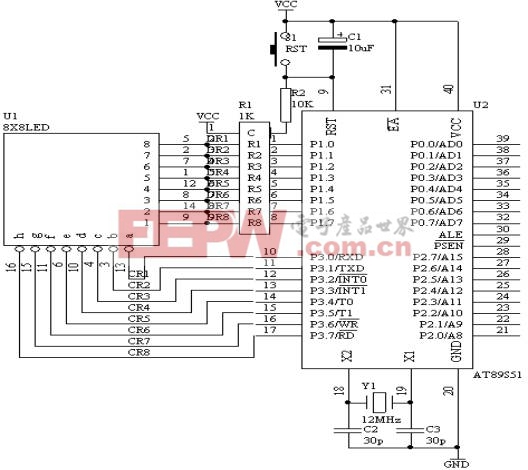
图4.24.1
3 硬件电路连线
(1) 把“单片机系统”区域中的P1端口用8芯排芯连接到“点阵模块”区域中的“DR1-DR8”端口上;
(2) 把“单片机系统”区域中的P3端口用8芯排芯连接到“点阵模块”区域中的“DC1-DC8”端口上;
4 程序设计内容
(1) 8X8 点阵LED工作原理说明
8X8点阵LED结构如下图所示
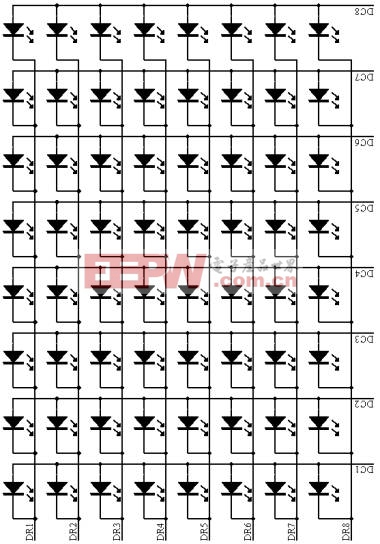
从图4.24.2中可以看出,8X8点阵共需要64个发光二极管组成,且每个发光二极管是放置在行线和列线的交叉点上,当对应的某一列置1电平,某一行置0电平,则相应的二极管就亮;因此要实现一根柱形的亮法,如图49所示,对应的一列为一根竖柱,或者对应的一行为一根横柱,因此实现柱的亮的方法如下所述:
一根竖柱:对应的列置1,而行则采用扫描的方法来实现。
一根横柱:对应的行置0,而列则采用扫描的方法来实现。
5 汇编源程序
ORG 00H
START: NOP
MOV R3,#3
LOP2: MOV R4,#8
MOV R2,#0
LOP1: MOV P1,#0FFH
MOV DPTR,#TABA
MOV A,R2
MOVC A,@A+DPTR
MOV P3,A
INC R2
LCALL DELAY
DJNZ R4,LOP1
DJNZ R3,LOP2
MOV R3,#3
LOP4: MOV R4,#8
MOV R2,#7
LOP3: MOV P1,#0FFH
MOV DPTR,#TABA
MOV A,R2
MOVC A,@A+DPTR
MOV P3,A
DEC R2
LCALL DELAY
DJNZ R4,LOP3
DJNZ R3,LOP4
MOV R3,#3
LOP6: MOV R4,#8
MOV R2,#0
LOP5: MOV P3,#00H
MOV DPTR,#TABB
MOV A,R2
MOVC A,@A+DPTR
MOV P1,A
INC R2
LCALL DELAY
DJNZ R4,LOP5
DJNZ R3,LOP6
MOV R3,#3
LOP8: MOV R4,#8
MOV R2,#7
LOP7: MOV P3,#00H
MOV DPTR,#TABB
MOV A,R2
MOVC A,@A+DPTR
MOV P1,A
DEC R2
LCALL DELAY
DJNZ R4,LOP7
DJNZ R3,LOP8
LJMP START
DELAY: MOV R5,#10
D2: MOV R6,#20
D1: MOV R7,#248
DJNZ R7,$
DJNZ R6,D1
DJNZ R5,D2
RET
TABA: DB 0FEH,0FDH,0FBH,0F7H,0EFH,0DFH,0BFH,07FH
TABB: DB 01H,02H,04H,08H,10H,20H,40H,80H
END
6 C语言源程序
#include AT89X52.H>
unsigned char code taba[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
unsigned char code tabb[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
void delay(void)
{
unsigned char i,j;
for(i=10;i>0;i--)
for(j=248;j>0;j--);
}
void delay1(void)
{
unsigned char i,j,k;
for(k=10;k>0;k--)
for(i=20;i>0;i--)
for(j=248;j>0;j--);
}
void main(void)
{
unsigned char i,j;
while(1)
{
for(j=0;j3;j++) //from left to right 3 time
{
for(i=0;i8;i++)
{
P3=taba[i];
P1=0xff;
delay1();
}
}
for(j=0;j3;j++) //from right to left 3 time
{
for(i=0;i8;i++)
{
P3=taba[7-i];
P1=0xff;
delay1();
}
}
for(j=0;j3;j++) //from top to bottom 3 time
{
for(i=0;i8;i++)
{
P3=0x00;
P1=tabb[7-i];
delay1();
}
}
for(j=0;j3;j++) //from bottom to top 3 time
{
for(i=0;i8;i++)
{
P3=0x00;
P1=tabb[i];
delay1();
}
}
}
}
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)