基于CAN总线的数字式传感器群管理系统
时间:04-13
来源:互联网
点击:
随着自动化技术的不断发展与控制精度的不断提高,需要测量的参量也越来越多,例如:一个钢铁厂需要20 000台传感器及其仪表,一个电站需要5 000台传感器及其仪表,一部汽车需要30~100台传感器。传感器作为获取信息的工具,它位于信息系统的最前端,其特性的好坏、输出信息的可靠性与准确性对整个系统质量至关重要。
传统的测量手段和传感器存在很大的缺陷,就温度检测为例,早期的温度测量采用的是热电偶电桥法,虽然这种方法测量精度较高,但是测试过程复杂。即使采用集成的半导体模拟温度传感器,但在测点相隔相对较远、测点较多的场合,需要大量的传输电缆,不但传输干扰大,且成本高和不易维护。这些都是采用模拟传感器构成检测系统常遇到的困难。
1 新型的数字化传感器
近年来出现的新型数字式传感器组成的检测系 统解决了上述的困难。
用数字信号取代原来的4~20mA标准模拟信号,进而提高可靠性和抗干扰能力。这就要求传感器由可输出4~20mA标准信号的变送器改变为带数字总线接口并输出数字信号。所有现场传感器通过数字总线接口都方便地挂接在一条环形现场总线上,这样可以大大削减控制室之间一对一的连接导线,节约初期安装费用,大大简化整个系统的布线和设计,这种节约对一个大型、多点测量系统是很有意义的。
所谓数字传感器就是一种带有微处理器兼有检测和信息处理功能的传感器,传感器系统的功能由以往的信息检测扩展到兼有信息处理功能,它采用了半导体集成电路和微控制器的最新技术,在一个传感器上集成了参量测量芯片、数据信号转换芯片、计算机接口芯片、存储芯片等多个功能模块,除了完成参量检测功能外,还具有自校零、自标定、自校正和自动补偿功能。某些高级的数字传感器甚至还具有自动检验、自选量程、自寻故障、数据存储、记忆功能;具有双向通讯、标准化数字输出或者符号输出功能;具有判断、决策处理功能。
数字式传感器常采用串行数据总线技术与外界通讯,串行总线除了减少接口引脚的数目外,还可以将多个传感器并联或串联在总线上,方便的实现分布式测量。目前在数字温度传感器中采用的串行总线主要有Philips公司的I2C总线、Motorola公司的SPI总线、National Semiconductor公司的Microwire plus总线和Dallas Semiconductor公司的1 Wire总线等。
2 CAN总线功能与特征
CAN属于总线式串行通信网络,与一般的通信总线相比,CAN总线的数据通信具有较高的可靠性和较强的实时性。其特点如下:
(1)CAN为多主方式工作,而不分主从,通信方式灵活,且无需站地址等节点信息。
(2)CAN采用非破坏性总线仲裁技术,从而大大节省了总线冲突仲裁时间,尤其是在网络负载很重的情况下也不会出现网络瘫痪的情况。
(3)CAN的直接通信距离最远可达10 km;节点数目前可达110个,通信速率最高可达1 Mbps,数据帧带CRC校验,出错率极低。
(4)CAN节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响。
3 系统总体方案设计
整个系统分两级管理(见图1),上位机采用了一般的PC机,配置为赛扬667/128 M/30 G/17英寸纯平彩显,PC机通过CAN接口适配卡与CAN总线相连,与下位机进行信息交换,负责对整个系统进行监控及给下位机发送各种操作控制命令和设定参数。下位机通过扩展CAN接口芯片挂接在CAN总线上,接收上位机的设置和命令。下位机的数量取决于控制现场的规模,最多能挂接110个CAN节点。一个下位机管理若干个数字式传感器,传感器的个数依实际需要决定。
传统的测量手段和传感器存在很大的缺陷,就温度检测为例,早期的温度测量采用的是热电偶电桥法,虽然这种方法测量精度较高,但是测试过程复杂。即使采用集成的半导体模拟温度传感器,但在测点相隔相对较远、测点较多的场合,需要大量的传输电缆,不但传输干扰大,且成本高和不易维护。这些都是采用模拟传感器构成检测系统常遇到的困难。
1 新型的数字化传感器
近年来出现的新型数字式传感器组成的检测系 统解决了上述的困难。
用数字信号取代原来的4~20mA标准模拟信号,进而提高可靠性和抗干扰能力。这就要求传感器由可输出4~20mA标准信号的变送器改变为带数字总线接口并输出数字信号。所有现场传感器通过数字总线接口都方便地挂接在一条环形现场总线上,这样可以大大削减控制室之间一对一的连接导线,节约初期安装费用,大大简化整个系统的布线和设计,这种节约对一个大型、多点测量系统是很有意义的。
所谓数字传感器就是一种带有微处理器兼有检测和信息处理功能的传感器,传感器系统的功能由以往的信息检测扩展到兼有信息处理功能,它采用了半导体集成电路和微控制器的最新技术,在一个传感器上集成了参量测量芯片、数据信号转换芯片、计算机接口芯片、存储芯片等多个功能模块,除了完成参量检测功能外,还具有自校零、自标定、自校正和自动补偿功能。某些高级的数字传感器甚至还具有自动检验、自选量程、自寻故障、数据存储、记忆功能;具有双向通讯、标准化数字输出或者符号输出功能;具有判断、决策处理功能。
数字式传感器常采用串行数据总线技术与外界通讯,串行总线除了减少接口引脚的数目外,还可以将多个传感器并联或串联在总线上,方便的实现分布式测量。目前在数字温度传感器中采用的串行总线主要有Philips公司的I2C总线、Motorola公司的SPI总线、National Semiconductor公司的Microwire plus总线和Dallas Semiconductor公司的1 Wire总线等。
2 CAN总线功能与特征
CAN属于总线式串行通信网络,与一般的通信总线相比,CAN总线的数据通信具有较高的可靠性和较强的实时性。其特点如下:
(1)CAN为多主方式工作,而不分主从,通信方式灵活,且无需站地址等节点信息。
(2)CAN采用非破坏性总线仲裁技术,从而大大节省了总线冲突仲裁时间,尤其是在网络负载很重的情况下也不会出现网络瘫痪的情况。
(3)CAN的直接通信距离最远可达10 km;节点数目前可达110个,通信速率最高可达1 Mbps,数据帧带CRC校验,出错率极低。
(4)CAN节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响。
3 系统总体方案设计
整个系统分两级管理(见图1),上位机采用了一般的PC机,配置为赛扬667/128 M/30 G/17英寸纯平彩显,PC机通过CAN接口适配卡与CAN总线相连,与下位机进行信息交换,负责对整个系统进行监控及给下位机发送各种操作控制命令和设定参数。下位机通过扩展CAN接口芯片挂接在CAN总线上,接收上位机的设置和命令。下位机的数量取决于控制现场的规模,最多能挂接110个CAN节点。一个下位机管理若干个数字式传感器,传感器的个数依实际需要决定。
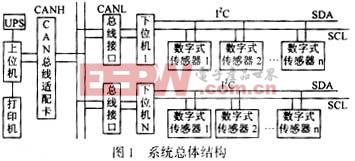
下位机与传感器通过串行数据总线连接,不同公司的产品支持不同的串行总线,这里采用了Philips公司的I2C总线,下位机的作用主要是控制传感器进行数据采集,并与主机进行数据通讯,下位机内置的单片机接收主机的指令,完成对传感器的 寻址、序号设定、数据传输以及CRC校验等工作,并提供传感器自身的故障检测和处理。
4 硬件结构
PC机与CAN总线的接口由CAN通信接口卡PCCAN完成,PCCAN为北京三兴公司开发的智能适配卡,该卡上有高性能的嵌入式微处理器80C188,有2 KB的高速双口RAM直接映射到主机内存空间。操作时,用户通过软件设置将卡上的双口RAM映射成PC机的物理内存,这样用户收发数据就相当于直接向内存读写数据,从而极大的提高了通信卡和PC总线的数据交换速率。连接时,只要将PC-CAN插入PC的ISA总线扩展槽,再将卡上的DB—9插座按CAN标准与双绞线相连即可。
CAN硬件接口电路由单片机、CAN协议控制器、CAN总线收发器组成(见图2),CAN控制器主要由实现CAN总线协议部分和与微控制器接口部分电路组成。对于不同型号的CAN总线通信控制器,实现CAN协议部分电路的结构基本相同,而与微控制器接口部分的结构及其方式存在一些差异,这里采用Philips的82C200为CAN协议控制器,它具有完成高性能通信协议所要求的全部必要特性,通过简单连接可以完成CAN协议的物理层和数据链路层的所有功能,应用层功能可以由微控制器完成。
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)