机载PD火控雷达系统1553B总线驱动层与传输层软件界面分析
图6 双机收发时序关系 在图6中,T为总线传输和数据更新周期,S1、S2、S3分别为发送方的数据更新事件,R1、R2、R3分别为接收方的查询采样事件,由于任务负载的不均匀性,S1、S2和S3以及R1、R2和R3之间几乎不可能以等间隔发生,所以在采用单缓冲区进行数据传输时为保证数据传输的一致性而应用读写锁机制以后,消息S2将由于S1尚未被接收而被丢弃;采样R3又由于未收到任何消息而耗费一个周期,在这样的系统中,理论上数据丢失率可能会达到50%,对离散的工作命令,数据的丢失将影响系统的正常工作;对连续变化的状态参数,如此高的丢失率实际上使得系统的传输率下降一倍,这也会影响系统的工作精度。解决数据丢失问题的主要方法是采用双缓冲区机制。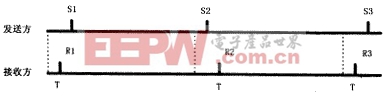
双缓冲区机制就是对每个消息块建立A、B两个缓冲区,A区写锁关闭、读锁打开时,B区读锁关闭、写锁打开。可以证明,只要不出现超时,任何消息都可通过A、B两个缓冲区中的一个进行传输,并且不会被丢失。例如,在图6中,若消息S1通过A区被R2接收,则S2会通过B区被R3接收,不会发生S2丢失的问题。
采用读写锁和双缓冲区机制的传输过程可以描述为:
发送方: 接收方:
if(写指针指向A区){ if(A区读锁已打开){
if(A区读锁已关闭){ 读A区消息块;
发送消息块至A区;关闭A区读锁;
打开A区读锁; }
写指针指向B区; else if (B区读锁已打开){
}读B区消息块;
else{关闭B区读锁;
置超时标志: }
}
}
else{
if(B区读锁已关闭){
发送消息块至B区;打开B区读锁;
写指针指向A区;
}
else{
置超时标志;
}
}
5 RTC同步机制
机载PD火控雷达是综合火控系统中最主要的传感器之一,它一方面依赖于其它机载设备提供的高精度飞机运动参数才能进行正常工作,另一方面也要向显示控制及火控计算机等子系统提供高精度的目标数据,才能进行有效的武器控制,因此精度问题是影响综合火控系统工作的根本问题之一。
影响数据精度的因素很多,如传感器误差和子系统的计算方法等。在总线通讯系统设计中需要考虑的则主要是传输延迟引起的误差,对此系统设计者必须考虑到几个主要问题:其一是传输延迟的模型问题,其二是系统同步问题,其三是延迟误差修正算法问题。早期的火控系统往往忽略传输延迟或将传输延迟简单地考虑为固定延迟,因而同步问题和算法问题都可得到简化,这对慢速运动的载机和目标而言是可以接受的。然而,总线通讯中的传输延迟除一部分可以预知的固定延迟外,还有相当复杂的随机延迟,当问题空间中速度和机动提高时,上述的的简化方法便会引起很大的精度损失,因此必须提供有效的方法以解决延迟误差,尤其是随机延迟误差问题,其中系统同步便是解决其它所有问题的前提。
事实上,航空电子系统的各个子系统都建立了本身的局部时钟,其精度可达微秒量级,但是由于1553B总线通讯的周期是十毫秒量级的,因此如果通过应用软件之间的消息传输来建立系统的全局时钟机制,那么这样的时钟其精度最高也只能是十毫秒量级的,这对系统中一些时间要求较高的处理是不足的。解决此问题的主要途径是使用总线RTC(Real Time Clock)同步机制。
RTC是一分辨率为20μs并以递增方式计数的32位数据,精度可达±50PPM(Parts per million),在各个MBI加电复位时RTC置“0”,并开始根据自己的局部时钟累积计数,必要时还可利用“不带数据字同步”方式指令对RTC进行复位。在系统工作过程中,作为BC的子系统CPU加载RTC,并利用每一次消息通讯将其RTC发送到各RT。因此,在RT的MBI中既有自身的RTC数据,也有该RTC与BC的RTC之差△RTC,这样各个子系统便可读取RTC及△RTC,从而建立起子系统时钟与全局时钟之间的对应关系。在数据传输中,每个发送子系统可在发送消息中附上采样时标,接收子系统收到此消息时虽已经过一定的延迟,利用时标能够准确地对这些数据进行外推处理,尽可能地减少因系统不同步造成的计算误差,提高系统的精度。所以RTC能够为航空电子系统的同步提供支持并为系统维护及事后数据处理提供依据。
6 结束语
1553B总线通讯技术已经在国内外机载PD雷达系统中得到充分应用,本文所提出的若干分析结果和设计思想也已运用于我国自行研制的机载PD火控雷达系统中。可以预见,在今后相当长的一段时间内,1553B总线仍将是机载PD雷达内、外部通讯的主要手段之一。随着微电子技术的发展,CPU及1553B协议芯片正不断地升级、换代和改型,但是为保证总线通讯软件的继承性和复用性,机载PD雷达中传输层和驱动层软件之间的接口界面应该相对稳定,并且这样的界面设计完全可以适应机载雷达发展的新的需求。
- 基于1553B总线的航天大功率电动舵机控制器设计(12-21)
- 1553B总线系统的可靠性研究(12-20)
- 1553B总线协议介绍(12-14)
- 1553B总线协议术语解释(12-14)
- 1553B总线常见问题(12-14)
- 基于1553B总线的PC/104测控系统(12-12)