一种新思路的太阳能自动跟踪系统设计
1.引言
伴随日益严重的能源危机,可再生资源的开发和利用成为人们研究的重点对象。太阳能以其普遍、长久、安全等优点脱颖而出。目前太阳能已被不同程度地用在了多个领域,如电池领域,但普遍存在利用率不高的问题,很多场合下,电池板要么被安装成固定角度,要么只能按照固定角度偏转,没有充分使太阳光垂直照射到电池板上,降低了太阳能的利用率。
为提高利用率,本文设计了一种基于Atmega16单片机的太阳能电池板光源跟踪控制系统,能够实时跟踪太阳并使太阳光充分垂直照射电池板,从而提高了太阳能的利用率。
2.系统设计原理
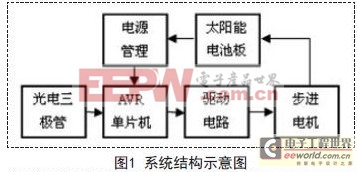
设计采用光强比较法来跟踪太阳光源。整机装置包括:太阳能电池板、电源管理电路、光电管、单片机、电机驱动电路、步进电机以及机械转动平台。系统结构如图1所示。
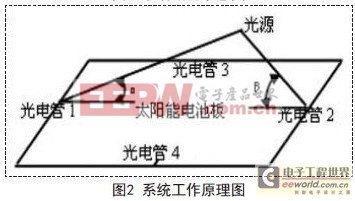
系统工作原理如图2所示,在太阳能电池板边沿的中间位置分别安装一个光电管,根据太阳光照射到电池板对边两个光电管的角度(如图α、β)不相等,使得光电管1、2感受的光照强度不同从而产生大小不同的光电流,将光流转换成电压信号,通过比较采集后的电压信号,控制步进电机向电压大的方向转动。
3.系统硬件设计
3.1光强采集电路
系统使用灵敏度较高的3DU33光电管作为光强检测器件,其光电流大于2mA,发射极只需串接很小的电阻便可得到可被采集的电压,而且其响应时间1ms,反应速度快。
需要注意的是,强光下,光电流较大,此时光电管发射极电阻不宜过大[2],否则各个光电管输出电压均趋于5V,系统不能检测出对边两只光电管的输出电压差。该设计中,R1使用330Ω,在冬天中午阳光照射下,测得输出电压已达到3.6V.
3.2 步进电机
设计使用5线四相减速步进电机28BYJ-48,减速比为1:64,步矩角为5.625°/64=0.087 89°,远小于不带减速比的步进电机,这是提高跟踪精度的很好选择。
对于四相步进电机,其工作方式可分为单4拍、双4拍、8拍三种工作方式。单4拍与双4拍的步距角相等,但单4拍的转动力矩小。8拍工作方式的步距角是单4拍与双4拍的一半,因此,8拍工作方式既可以保持较高的转动力矩又可以提高控制精度。设计采用8拍工作方式,那么1拍转过的角度为0.087 89°/2=0.043945°,进一步提高了跟踪精度。
3.3 电源管理电路
为了使系统能够在室外正常运行,设计采用太阳能电池板和锂电池合理给系统供电。当太阳能电池板输出功率不够时,由锂电池给系统供电;当锂电池电压低于3.5V的时候,太阳能电池板给锂电池充电;否则由太阳能电池板给系统供电。
测试知,系统正常运行时输入功率接近2.5W(5V/480mA)。考虑到天气和季节因素,一般要求电池板的最大输出功率要3W以上,故设计采用8片太阳能电池片(0.5V/1.2A)串联,得到4V/1.2A(最大输出4.8W)的输出,经DC-DC升压电路给系统供电。
4.系统软件设计
软件流程图如图3所示,系统一上电先进行粗调来确定太阳光源的大概位置。其思想是:将水平面平均分成12个区域,在每个区域中对光照强度采样8次,并累加保存。进入下一个区域,同样采样8次并累加,比较相邻区域累加值的大小,并让电机向累加值大的区域方向转动,直到找到累加值最大的区域,这时说明太阳位置在这个区域范围内。
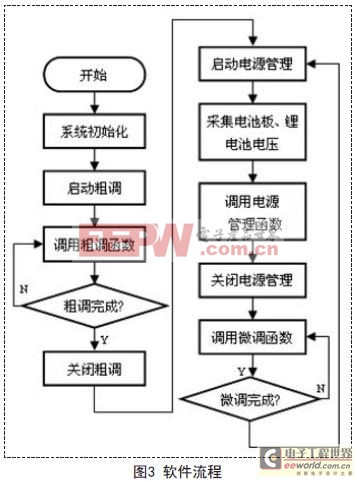
粗调完成后,对系统电源进行管理,分别对太阳能电池板电压和锂电池电压采样,经单片机分析,正确的对开关进行操作以合理地为系统配备电能。
微调思想:先对X方向调整,完成后,再对Y方向调整。为得到较平滑的采样数据,先使光电管采样64次,再求和取平均,通过比较对边光电管的平均值,决定步进机的转动方向。直到X方向和Y方向的两个光电管采样值都相等,则调整完成,此时光源处于电池板中心处。
5.运行测试
测试条件:光源距离激光笔105cm,激光笔安装在电池板的中心,Y方向上,激光笔在偏离光源±30°范围内。测试结果如表1所示。

6.结束语
测试结果表明,在偏离光源±45°范围内,系统均能在9s内定位光源,并且偏差不大于4cm.实际应用时,系统实时紧跟太阳,不会出现太阳突然偏转电池板一个较大角度的情况,因此激光笔偏离光源距离是所关心的,而本设计测得的偏离距离不超过4cm,达到设计要求。
- 一种太阳能报警器系统设计(04-26)
- 工业以太网交换机应用于太阳能热电控制系统(12-21)
- Moxa基于无线的住宅太阳能发电系统(12-20)
- 太阳能光伏发电系统的组成及原理(12-15)
- 基于单片机设计的太阳能环境参数测试仪电路(12-02)
- 基于51的太阳能LED路灯的设计与实现(11-29)