��PIC16F84ʵ�ֵ���Ȼ�緢����
ʱ�䣺01-09
��Դ��������
�����
��ͨ����ȵ��ͷ�ǿ���Dz���ģ�������������Ȼ�������������ˡ����������PIC16F84��Ƭ������һ����Ȼ�緢����������͵���ȴ���ʱ������ʹ������ͳ�ʱǿʱ���ķ���Ȼ�硣
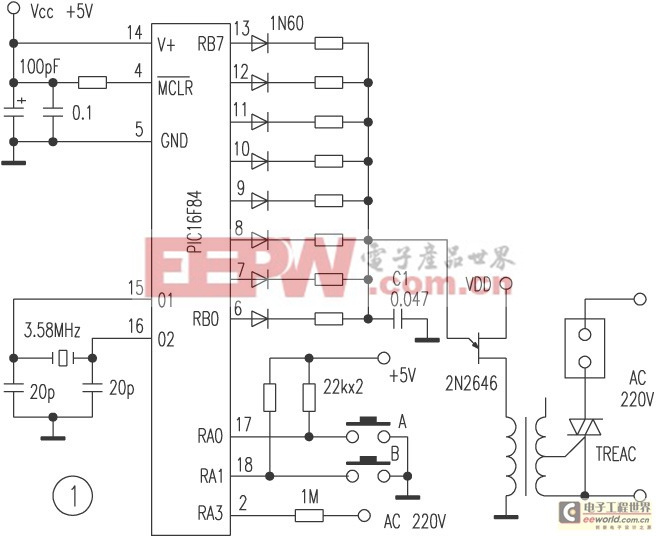
һ��Ӳ����·��ԭ��
Ҫʹ������ͳ�����Ȼ�磬����Ҫ�ı������ͷ��ǿ��������Ҫ�ı���ȵ���ĵ�ѹ�͵������Ӷ��ı���ת�١���ͼ����ʾ�����Ȳ����뾧բ�ܣԣңţ����മ�����ı侧բ�ܿ��ƽǦ��������ƾ�բ�ܵ�ͨ��ʱ�䣬����ʹ���ȵ���ĵ�ѹ�����������仯��ͼ��չʾ�˦��Ǻ͵�����ص�ѹ�Ĺ�ϵ��
���ǵı仯�ֿ�ͨ�����ݣã��ij�ŵ�ʱ��ĸı���ʵ�֡�PIC16F84��Ƭ����һ������ѡ�����ң������ɸı���ݣã��ij�ŵ�ʱ�䣬�Ӷ��ı䣲�Σ��������ĵ�ͨʱ�䡣�ı��ˣԣңţ��õĵ�ͨ�ǣ��ﵽ�ı������ͷ�ǿ����Ŀ�ġ����ƽǦ���ǿ����Ĺ�ϵ��ͼ����ʾ��
�е�Ƶ�ʣ棽�����ȣ�����ɵ���ʽ ��/360�㣽t/0.02 ����������(��)
��������ͼ����ʾ�ң��ã�����·������֪
��������t��360��/0.02 ��{RxC1ln1[1/(1-n)]}��360��/0.02 ����������(��)��
�������У��ǣ��֣У��֣££��֣�Ϊ�ã�����ĵ�ѹֵ���֣£�Ϊ����Դ��ѹ��һ��ȡ�ǣ���.�����������ݣ�Ϊ��.�������̣ƣ�����(��)ʽ��ֵ����ö�Ӧ�ڲ�ͬ�Ħ��趨ֵ�ģң�ֵ����
�ң������릸���ң��������릸���ң��������릸���ң��������릸���ң����������릸���ң����������릸���ң����������릸���ң����������릸��
�ң�����PIC16F84��Ƭ���ģң£����ң£��ڣ��ң�����Ϊ�����ź�����ڣ�����������ʱ����Ȼ�緢������ʼ�������ң�����Ϊֹͣ�ź�����ڣ����¼�����ʱ����Ȼ�緢����ֹͣ���У��ң�����Ϊ��������λ���ڡ�����ȷ�����������ʼ��λ��
�����嵥��
���� �� �̣ӣɣ� �У��Уɣã����ƣ���
���� �����ɣΣạ̃գģ� �У����ƣ����ɣΣ�
�������ƣ� �ţѣգ��ã�
������ �ƣ� �ţѣգ��ģ�
������ �ϣң� ��
�ͣ��ɣΣ��ạ̃ң�
������ �ԣңɣ� �ң�
�������ͣϣ֣ףƣң£��ãң¿�Ϊ����ڣ�
������ �������������������ֵΪ��
������ �ͣϣ֣̣ף��ƣ�
�������ԣңɣ� �ң��������ã���Ϊ�����
�ˣţ٣����£ԣƣӣãң����� �������Ƿ��¡�
�������ǣϣԣ� �ˣţ٣� ������δ����ת
���������������������ˣţ٣����ȴ�
�ӣԣ��ңԣ��ͣϣ֣̣ף����ȡ� ���������£�
���������������� ���� �������ȡ��ƣ�
�������ͣϣ֣ףƣƣ�
������ �£ԣƣӣӣң����� �����¼����·�
�������ǣϣԣ� �ͣ��ɣ� �����¼�����
�Уȣ��ӣţ��£ԣƣӣãң���
������ �ǣϣԣ� �Уȣ��ӣ� ���ȴ�������
���������� ���������� ����λ
�� ���� �ͣϣ֣ƣ�����
������ �ͣϣ֣ףƣң� �� ���ƣ����ң¿�
������ �ã��̣� �ģţ̣��٣���ʱ������
������ �ạ̃ңá� ������ �����
������ �ңң� �ƣ� �� ���ƣ�����
������ �£ԣƣӣӣ�����
���� ���ǣϣԣ� �Уȣ��ӣ�
������ �ǣϣԣ� �ӣԣ��ң�
�ģţ̣��٣��ͣϣ֣̣� ������
������ �ͣϣ֣ף� �ƣ�
���� �� �ͣϣ֣̣� �����������ңԣã�Ԥ
�������� ���������� �豶�����ã�����
�������ϣУԣɣϣ�
�̣ϣϣУ��ͣϣ֣̣� ������
������ �ӣգ£ף� �ңԣã�
�������£ԣƣӣ� ������
������ �ģţãƣӣ� �ƣ�
�������ǣϣԣ� �̣ϣϣ�
������ �ңţԣ̣� ��
�������ţΣġ��� ���������������
һ��Ӳ����·��ԭ��
Ҫʹ������ͳ�����Ȼ�磬����Ҫ�ı������ͷ��ǿ��������Ҫ�ı���ȵ���ĵ�ѹ�͵������Ӷ��ı���ת�١���ͼ����ʾ�����Ȳ����뾧բ�ܣԣңţ����മ�����ı侧բ�ܿ��ƽǦ��������ƾ�բ�ܵ�ͨ��ʱ�䣬����ʹ���ȵ���ĵ�ѹ�����������仯��ͼ��չʾ�˦��Ǻ͵�����ص�ѹ�Ĺ�ϵ��
���ǵı仯�ֿ�ͨ�����ݣã��ij�ŵ�ʱ��ĸı���ʵ�֡�PIC16F84��Ƭ����һ������ѡ�����ң������ɸı���ݣã��ij�ŵ�ʱ�䣬�Ӷ��ı䣲�Σ��������ĵ�ͨʱ�䡣�ı��ˣԣңţ��õĵ�ͨ�ǣ��ﵽ�ı������ͷ�ǿ����Ŀ�ġ����ƽǦ���ǿ����Ĺ�ϵ��ͼ����ʾ��
�е�Ƶ�ʣ棽�����ȣ�����ɵ���ʽ ��/360�㣽t/0.02 ����������(��)
��������ͼ����ʾ�ң��ã�����·������֪
��������t��360��/0.02 ��{RxC1ln1[1/(1-n)]}��360��/0.02 ����������(��)��
�������У��ǣ��֣У��֣££��֣�Ϊ�ã�����ĵ�ѹֵ���֣£�Ϊ����Դ��ѹ��һ��ȡ�ǣ���.�����������ݣ�Ϊ��.�������̣ƣ�����(��)ʽ��ֵ����ö�Ӧ�ڲ�ͬ�Ħ��趨ֵ�ģң�ֵ����
�ң������릸���ң��������릸���ң��������릸���ң��������릸���ң����������릸���ң����������릸���ң����������릸���ң����������릸��
�ң�����PIC16F84��Ƭ���ģң£����ң£��ڣ��ң�����Ϊ�����ź�����ڣ�����������ʱ����Ȼ�緢������ʼ�������ң�����Ϊֹͣ�ź�����ڣ����¼�����ʱ����Ȼ�緢����ֹͣ���У��ң�����Ϊ��������λ���ڡ�����ȷ�����������ʼ��λ��
�����嵥��
���� �� �̣ӣɣ� �У��Уɣã����ƣ���
���� �����ɣΣạ̃գģ� �У����ƣ����ɣΣ�
�������ƣ� �ţѣգ��ã�
������ �ƣ� �ţѣգ��ģ�
������ �ϣң� ��
�ͣ��ɣΣ��ạ̃ң�
������ �ԣңɣ� �ң�
�������ͣϣ֣ףƣң£��ãң¿�Ϊ����ڣ�
������ �������������������ֵΪ��
������ �ͣϣ֣̣ף��ƣ�
�������ԣңɣ� �ң��������ã���Ϊ�����
�ˣţ٣����£ԣƣӣãң����� �������Ƿ��¡�
�������ǣϣԣ� �ˣţ٣� ������δ����ת
���������������������ˣţ٣����ȴ�
�ӣԣ��ңԣ��ͣϣ֣̣ף����ȡ� ���������£�
���������������� ���� �������ȡ��ƣ�
�������ͣϣ֣ףƣƣ�
������ �£ԣƣӣӣң����� �����¼����·�
�������ǣϣԣ� �ͣ��ɣ� �����¼�����
�Уȣ��ӣţ��£ԣƣӣãң���
������ �ǣϣԣ� �Уȣ��ӣ� ���ȴ�������
���������� ���������� ����λ
�� ���� �ͣϣ֣ƣ�����
������ �ͣϣ֣ףƣң� �� ���ƣ����ң¿�
������ �ã��̣� �ģţ̣��٣���ʱ������
������ �ạ̃ңá� ������ �����
������ �ңң� �ƣ� �� ���ƣ�����
������ �£ԣƣӣӣ�����
���� ���ǣϣԣ� �Уȣ��ӣ�
������ �ǣϣԣ� �ӣԣ��ң�
�ģţ̣��٣��ͣϣ֣̣� ������
������ �ͣϣ֣ף� �ƣ�
���� �� �ͣϣ֣̣� �����������ңԣã�Ԥ
�������� ���������� �豶�����ã�����
�������ϣУԣɣϣ�
�̣ϣϣУ��ͣϣ֣̣� ������
������ �ӣգ£ף� �ңԣã�
�������£ԣƣӣ� ������
������ �ģţãƣӣ� �ƣ�
�������ǣϣԣ� �̣ϣϣ�
������ �ңţԣ̣� ��
�������ţΣġ��� ���������������