基于MC9S12XEP100的旋转磁场定向测距系统设计
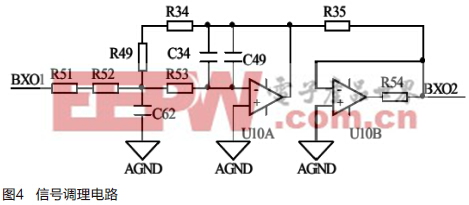
将转化后的数字信号送入MC9S12XEP100单片机进行相关处理。CPU处理完成后,将信号输出进行编码,其电路如图4所示。
3 软件设计
3.1 通信协议
系统正常工作采用1553协议通过单芯电缆进行数据传输。上位机下传命令如表1所示,主要包括交直流量采集、状态设置、状态查询、通讯握手和停止采集等命令。下位机数据上传格式,采用数据帧长度、数据包、帧校验的形式,其中数据包包含交直流量、状态查询、状态等。如表1。

3.2 井上系统软件流程图
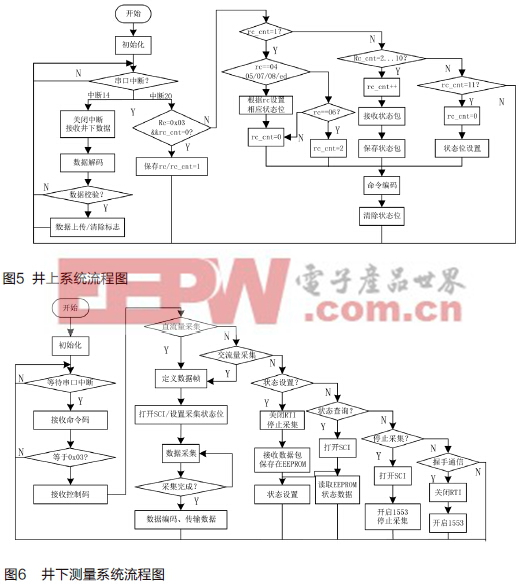
结合1553协议和井上通信系统的功能进行软件开发,其工作流程图如图5所示。首先,系统关闭中断,对PLL、PWM、SCI、PORT、编解码等模块进行初始化,完成初始化工作后开启中断;其次,等待中断,当检测到串口中断时,进行相应的中断处理。系统主要有两大中断:第一,中断20用于转发上位机发送的命令,其中0306命令之后包含状态设置数据包(13Bit)的接收,接收完成后对其进行编码并转发至井下测量系统;中断14用于接收井下系统返回的数据包。数据包在接收完成之后对其进行解码并转发至上位机。最后,清除相关设置,循环等待中断。如图5。
3.3 井下测量软件流程图
井下测量系统主要功能是按照井下系统命令完成相关测量、设置和查询,其流程图如图6所示。系统在完成相关初始化工作之后,进入中断等待;当产生串口中断时,判断是否为命令码,如果为命令码0x03,则接收控制码,否则继续等待。接着,查询是否是1553规定的控制码,如果是则执行相应的操作(如命令码03、控制码04,则进行直流量数据采集),完成相关操作之后根据1553协议返回相应的数据包。最后,清除相应设置,等待下一次中断。
3.4 地面试验
参照动态磁偶极子模型,建立地面试验装置。首先,模拟磁工装,产生交变磁场。在ANSYS电磁仿真的基础上选用温度性能最优的N42SH永磁铁进行设计。为了模拟井下实验中,磁工装短节安装在作业井钻头和螺杆钻具间且永磁体的南北极垂直于钻头的钻井方向,钻头带动永磁体旋转的状态。地面实验采用步进电机带动磁工装短节对其姿态进行调节,根据需要可以控制不同的转速。本次试验以492rad/s的速度进行旋转,产生一个中心频率为1Hz的交变磁场源;其次,数据采集系统。为了便于模拟不同角度和距离的数据采集,利用台架固定测量装置中探管的位置,通过移动磁工装来调节磁工装与探管间的角度和距离。试验在60mX30m的场地上进行,设置测量装置放大倍数为100或200,以5m为基准,移动磁工装进行测量,得到测量点x、y、z三轴的坐标,通过计算得到测量的距离及相对误差,如表2,其中,磁工装与测量装置间的实际距离利用激光器进行定位。由表可知,在50m范围内,测量距离误差在5%以内,超过50m误差急剧增大。如表2。
4 结束语
基于动态磁偶极子模型,提出了以钻头为坐标原点的三维旋转磁场定向测距系统方案。结合动态系统模型完成了基于MC9S12XEP100的旋转磁场定向测距系统硬件设计,制定了井上通讯板和井下测量板之间的通讯协议、软件的设计。搭建地面模拟实验平台,实验结果表明,在50m测量范围内,距离误差在5%以内,满足系统设计需求。为了进一步验证系统的可行性和测量的准确性,有待进行井下测量实验,以进一步改进改进和优化系统。
参考文献:
[1]闫向宏.随钻测井声波传输特性数值模拟研究[D].北京:中国石油大学,2010
[2]张绍槐.现代导向钻井技术的新进展及发展方向[J].石油学报,2003,24(3):82-85,89
[3]Macmillan S,Mekay A,Grindrod S.Confidence Limits Associated with Values of the Earth’s Magnetic Field Used for Directional Drilling[C].SPE Drilling & Completion,2009,25(2):230-238.
[4]Pech E,Mintchev M P.Observability Analysis for INS Alignment in Horizontal Drilling [J].IEEE Transactions on Instrumentation and Measurement,2007,56(5):1935-1945
[5]胡汉月,陈庆寿.RMRS在水平井钻进中靶作业中的应用[J].地质与勘探,2008,44(6):90-93
[6]Marschner U,Fischer W J.Indirect Measurement of a Bar Magnet Position Using a Hall Sensor Array[J].IEEE Transactions on Magnetics,2007,43(6):2728-2730
[7]宗艳波,张军,史晓锋,等.基于旋转磁偶极子的钻井轨迹高精度导向定位方法[J].石油学报,2011,32(2):1-5
[8]Kuckes A F.Rotating magnet for distance and direction meansurements from a first borehole to a second borehole:US,5589775[P].1996-11-31
[9]胡汉月,向军文,刘海翔,等.SmartMag定向中靶系统工业实验研究[J].探矿工程,2010,37(4):6-10
[10]宗艳波.旋转磁场定向测距随钻测量仪的研制与实验[J].石油钻探技术,2012,40(6):110-114
[11]AI-Khodhori S, AI-Riyami H, Holweg P, et al.Connector conductor wells technology in Brunei Shell petroleum: achieving high profitability through Multi-well bores and Down-hole connections[R].SPE 111441,2008
旋转磁场 连通井 磁偶极子 MC9S12XEP100 定向测距 201407 相关文章:
- 飞思卡尔单片机MC9S12XEP100中断优先级设置(11-28)
- 基于C8051F350和蓝牙技术的红外测温系统设计(06-26)
- 基于飞思卡尔MK10N512微控制器及MQX操作系统的电梯主控系统设计(06-26)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)