为你支招,步进电机驱动设计不再难
。
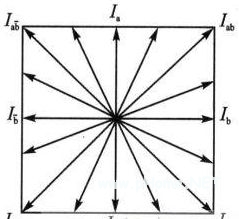
图5 二相电机相电流矢量合成图
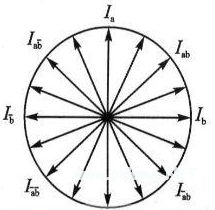
图6 电流可控的等角度恒力矩细分
下面介绍合成矢量幅值保持不变的数学模型:当Ia=Im·cosx,Ib=Im·sinx时(式中Im为电流额定值,Ia、Ib为实际的相电流,x由细分数决定),其合成矢量始终为圆的半径,即恒力距。
等角度是指合成的力臂每次旋转的角度一样。额定电流可调是指可满足各种系列电机的要求。例如,86系列电机的额定电流为6~8 A,而57系列电机一般不超过6 A,驱动器有各种档位电流可供选择。细分为对额定电流的细分。
为实现“额定电流可调的等角度恒力距”,理论上只要各相相电流能够满足以上的数学模型即可。这就要求电流控制精度非常高,不然Ia、Ib所合成的矢量角将出现偏差,即各步步距角不等,细分也失去了意义。
步进电机的选择
步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一旦三大要素确定,步进电机的型号便确定下来了。
1、步距角的选择
电机的步距角取决于负载精度的要求,将负载的最小分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。目前市场上步进电机的步距角一般有0.36度/0.72度(五相电机)、0.9度/1.8度(二、四相电机)、1.5度/3度(三相电机) 等。
2、静力矩的选择
步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。单一的惯性负载和单一的摩擦负载是不存在的。直接起动时(一般由低速)时二种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)
3、电流的选择
静力矩一样的电机,由于电流参数不同,其运行特性差别很大,可依据矩频特性曲线图,判断电机的电流。
4、力矩与功率换算
步进电机一般在较大范围内调速使用、其功率是变化的,一般只用力矩来衡量,力矩与功率换算如下:
p= ω·m
ω=2π·n/60
p=2πnm/60
其p为功率单位为瓦,ω为每秒角速度,单位为弧度,n为每分钟转速,m为力矩单位为牛顿·米
p=2πfm/400(半步工作)
其中f为每秒脉冲数(简称pps)
步进电机在应用中的注意点
1、步进电机应用于低速场合---每分钟转速不超过1000转,(0.9度时6666pps),最好在1000-3000pps(0.9度)间使用,可通过减速装置使其在此间工作,此时电机工作效率高,噪音低。
2、步进电机最好不使用整步状态,整步状态时振动大。
3、由于历史原因,只有标称为12v电压的电机使用12v外,其他电机的电压值不是驱动电压伏值,可根据驱动器选择驱动电压(建议:57byg 采用直流24v-36v,86byg采用直流50v,110byg采用高于直流80v),当然12伏的电压除12v恒压驱动外也可以采用其他驱动电源,不过要考虑温升。
4、转动惯量大的负载应选择大机座号电机。
5、电机在较高速或大惯量负载时,一般不在工作速度起动,而采用逐渐升频提速,一电机不失步,二可以减少噪音同时可以提高停止的定位精度。
6、高精度时,应通过机械减速、提高电机速度,或采用高细分数的驱动器来解决,也可以采用5相电机,不过其整个系统的价格较贵,生产厂家少,其被淘汰的说法是外行话。
7、电机不应在振动区内工作,如若必须可通过改变电压、电流或加一些阻尼的解决。
8、电机在600pps(0.9度)以下工作,应采用小电流、大电感、低电压来驱动。
9、应遵循先选电机后选驱动的原则。
步进电机调速注意特点
步进电机高速不能直接使用普通的交直流电源,需要专用的伺服控制器,应注意以下特点:
1、可以用数字信号直接进行开环控制,整个系统简单廉价,位移与输入脉冲信号数相对应,步距误差不长期积累,开环控制系统既简单又具有一定的精度; 在要求更高精度时,也可以采用闭环控制系统。
2、由于步进电机无刷,因此本体部件少,可靠性高。
3、易于起动,停止,正反转,速度响应性好;停止时一般有自锁能力。
4、步距角可在大范围内选择,在小步距情况下,能够在超低转速下高转距稳定运行,可以不经减速器直接驱动负载。
5、速度可在相当宽范围内平滑调节, 可以用一台控制器同时控制几台步进电机完全同步运行。
6、步进电机带惯性负载能力较差,由于存在失步和共振问题,步进电机的加减速方法在不同的应用状态下,情况较为复杂。
步进电机定位不准怎么办?
在调机过程中发现步进电机定位不准现象怎么办?一般由以下几方面原因引起:
1、 改变方向时丢脉冲,表现为
- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于TMS320F240控制步进电机的调焦系统设计(10-20)
- 基于嵌入式Linux的步进电机驱动程序设计(08-08)
- 基于TMS320F240的步进电机的调焦系统设计(03-10)
- DMC130A控制器在双液定量灌注机系统中的应用(06-06)
- 步进电机定位控制系统的VHDL程序设计(06-05)