一种便携式人体自动输液泵输液系统的开发
液时每分钟内驱动脉冲的最大数目Nmax为:
Nmax=200 N=3 800
通过键盘可以以药液流量和输液滴速两种方式设置输液速度,由于程序中的最小单位为滴,所以首先将药液流量方式下设置的输液速度转换为输液滴速,则药液流量V_M(ml/min)的输液滴速当量G_M(gtt/min)为:
G_M=20V_M
根据上面的推导,对于设定的输液滴速当量G_M,需要在每分钟内产生的驱动脉冲数目为19G_M,可推得微控制器TMS320LF2407A定时器1产生周期中断的周期寄存器T1PR值为:
在1~200 gtt/min的输液速度范围内,定时器1产生周期中断的周期寄存器T1PR的范围应为:1 578 948~7 895 μs。TMS320LF2407A取CLKIN为10 MHz,CLKOUT为4×CLKIN= 40 MHz,Timer1为连续增计数模式,预分频值为64,定时器时钟为0.625 MHz,最大的定时周期为104 856μs。因此程序中设置一个全局变量count,如图6所示。每次执行中断服务程序时对变量count加1计数,并判断是否达到设置的计数累计时间,若没有达到累计时间,则等待下一次中断,并重复判断过程。
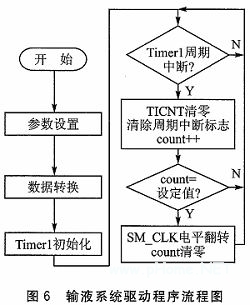
当设定好输液速度后,DSP会自动将对应的装载初值存入周期寄存器T1PR中,并把计数寄存器T1CNT清零,按下“运行”键后,定时器便从零开始计数,直到溢出产生周期中断,进入中断服务程序,计数寄存器T1CNT重新赋零,清除定时器1周期中断标志,count计数到时,使信号SM_CLK的电平发生翻转,然后等待下一次中断,则SM_CLK所在引脚按照一定周期产生占空比为1/2的PWM脉冲。这样,步进电动机在该PWM负脉冲信号的上升沿向前步进一个步距角度。
3 输液速度闭环检测电路设计
输液速度检测电路由美国HONEYWELL公司的小型触力传感器FSS1500NST、ADI公司的微功耗集成仪表放大器AD623、微功耗电压基准源ADR361等元件组成。输液速度检测电路原理如图7所示。
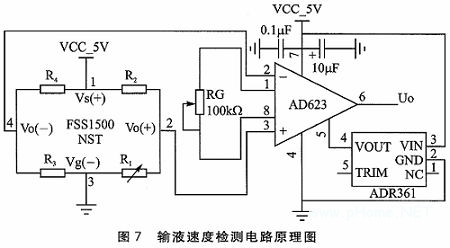
FSS1500NST使用专门设计的精制压电硅电阻传感元件,具有精密可靠的力传感性能。具有小功率、无放大、无补偿特点的惠斯通电桥电路设计,该传感器通过不锈钢球,将施加的触力直接集中到硅传感元件上,电阻值随施加力而变化,可在测力范围内提供稳定mV级输出信号。其主要参数如下:
工作力为0~1 500g,零位偏置为0 mV,灵敏度为0.12 mV/g,输入电阻为5.0 kΩ,输出电阻为5.0 kΩ。
惠斯通电桥就是利用压电电阻的高级触力传感器,这个结构可以测量桥式电路两臂平衡时其中一个臂上的未知电阻,如图7所示的压电电阻R1。激励电压或激励电流被施加于桥上,施加到压电元件的压力可以改变该电阻,因此产生电压变化。原理如下:
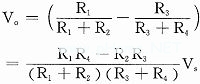
取R1=R2=R3=R4时,被测量使电阻R1产生一个△R1,得到:
AD623提供轨到轨满电源幅度输出,采用单电源(+3~+12 V)或双电源(±2.5~±6 V)供电;它可以测量差分电压,最大工作电流仅为85 mA,非常适合电池供电的便携式设备;具有低失调电压、低失调漂移与低增益误差等特点,从而使误差最小;在AD623的参考引脚施加低阻抗电压源可以改变输出电压;增益通过一只外接电阻可方便地调节。无外接电阻RG时,被设计为单位增益(G=1),接入电阻RG时,增益可高达1000,计算公式为:
RG=100 kΩ(G-1)
ADR361提供稳定的2.5 V输出电压。经过放大的输出信号加上基准电压2.5 V,作为模拟信号Uo输出到DSP进行A/D转换,ADR361使信号Uo处于DSP的有效输入范围内。
由于输液泵是靠输液管挤压进行输液,不可避免存在脉动问题,测得的输液管压力随之存在脉动。DG-1蠕动泵有10个滚轮,步进电机8拍方式工作,步距角为0.9°,则步进电机转360°需要400个脉冲,输液管脉动频率为40个脉冲。设计中采用每个电机驱动脉冲上升沿到来时,步进电机转动一步的同时启动A/D转换,40次A/D转换的值取算术平均值作为一个脉动周期的压力值。以所设置输液速度的压力值为基准,当压力或高或低时对TMS320LF2407A定时器1周期中断的周期寄存器T1PR的预置值进行调整,改变PwM脉冲的周期,以上下调整步进电机的运行速度,使输液始终稳定为所设置的输液速度。
4 输液速度实验
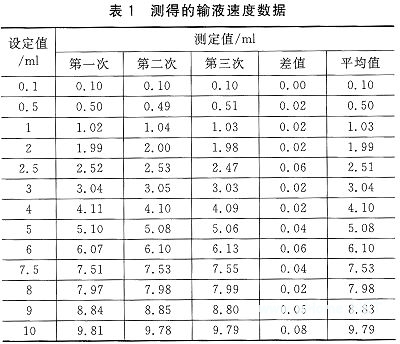
初次使用或更换输液管时,应利用量杯先校准输液泵的精度,根据精度值789.5μs/ml修正步进电机驱动脉冲的定时范围7 895~1 578 948 μs。
为尽量减少实验数据在测试时的误差,分别进行3次实验,对获得的3组数据取平均值,同时为判断3次测量结果波动情况,计算了3次测量结果中最大值和最小值的差值,结果如表1所列。从实验数据可以看出,输液速度误差基本可以控制在3%的范围内,同时,3次测量的输液速度基本保持一致,说明输液的稳定性较好。
结语
该自动控制系统解决了便
自动输液泵 便携式 DSP 输液速度 触力传感器 相关文章:
- SHARC 2147x系列处理器:具有低功耗,浮点处理精度,适用于便携式和电池供电的系统(03-28)
- 带DSP功能的超低功率音频编解码器帮助解决音频方案挑战(05-04)
- 基于嵌入式Linux的PMP系统设计与实现(08-20)
- MSP430低功耗原理及其在海温测量中的应用(06-06)
- 基于STM32F的便携式核谱仪的研制(02-01)
- 基于DSP和XC2S50嵌入式结构的便携数字存储示波表设计(06-06)