基于CAN总线的车灯设计
随着汽车安全性、舒适性、环保性要求的不断提高,汽车上的电子控制单元日益增多,传统车灯与状态监测方面临以下问题:
1、由于采用的是点到点的连接与控制,导线的长度、接点都与车灯的数量成正比。这样增加了线束的质量与体积,加剧了粗大的线束与汽车有限的可用空间的矛盾。
2、状态等所监测和只是的信息只是车灯开关的断开/闭合状态,而非车灯的实际工作状态,为汽车行驶带来安全隐患。
现在汽车车灯控制多采用继电器驱动方式。那么,这种方式有什么缺点呢:
缺点1:不具有故障诊断功能,一旦出现故障,不知道什么原因造成的故障,对维修造成不方便。
缺点2:继电器体积较大,因此在汽车这一空间有限的应用场合会造成潜在的安装不方便。
缺点3:继电器在吸和断开时存在振动现象,这不但会造成触电的烧蚀,而且会有很强的电磁辐射,对其它电气设备造成干扰。
缺点4:功率继电气励磁线圈驱动电流较大,需消耗较大功率且接口电路复杂。
因此,有必要对传统车灯控制与状态监测方法进行改进,提高汽车安全、舒适、环保等性能。汽车CAN总线实验教学系统研发工程师为大家介绍一下给予CAN总线的汽车车灯控制系统架构:
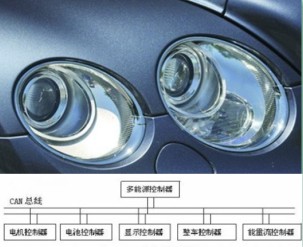
以车灯位置分布作为节点划分依据,采用CAN构建车灯控制系统,其中,系统由5个CAN节点构成,分别是左前车灯组控制节点、左后车灯组控制及诶单、右前车灯组控制节点、右后车灯组控制节点和中央控制节点。其中中央控制节点通过对开关状态变化的监测,向各车灯组控制节点发送控制指令,各车灯组节点在接收到属于本节点的控制指令后,分别控制对应位置的车灯动作,同时对车灯工作状态进行监测,并将监测结构通过CAN发送给中央控制节点,中央节点收到数据后,指示车灯状态。
根据行驶安全级别的不同,系统中各节点的优先级别依次为中央控制节点——左右车灯组控制节点——右后车灯组控制节点、右后车灯组控制节点涉及制动、转向等与行驶安全相关的车灯,其优先级依次次于中央控制节点。
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)