嵌入式采煤工作面安全集中监控系统
独讲解。
3.4.2.1非图像信号处理软件设计
(1)PID算法介绍
为了将瓦斯浓度维持在一个正常的水平,要求系统能够接受地面控制中心的控制参数对通风电机进行控制,同时为了体现灵活性,要求系统在平时能够自我调控,减少人的工作量。本次设计选用PID控制器实现平时系统的自我调节。系统能够根据瓦斯的浓度自动调节通风电机的转速,同时又能保证在紧急时刻将控制权交给地面控制中心。PID算法控制原理如图3.4.2.1-1所示:
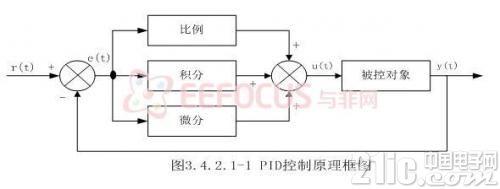
PID是比例、积分、微分的缩写,将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,用这一控制量对被控对象进行控制,这样的控制器就称为PID控制器。本次设计之所以选择PID控制器,主要是考虑到PID具有以下优点:技术成熟、易被人们熟悉和掌握、不需要建立数学模型、控制效果好。
如图3.4.2.1-1所示,该系统有模拟PID控制器和被控对象组成。图中,r(t)是给定值,y(t)是系统的实际输出值,给定值与实际输出值构成控制偏差e(t),有e(t)=r(t)-y(t)。e(t)作为PID控制器的输入,u(t)作为控制器的输出和被控对象的输入。
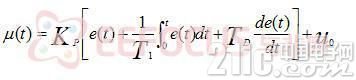
模拟PID控制器的控制规律为:
式3.4.2.1
其中:y(t) ——调节器的输出信号;
e(t) ——调节器的偏差信号,它等于给定值与测量值之差;
KP ——调节器的比例系数;
TI ——调节器的积分时间;
TD——调节器的微分时间。
在式3.4.2.1中,比例环节的作用是对偏差瞬间做出快速反应。偏差一旦产生,控制器立即产生控制作用,使控制量向减少偏差的方向变化。积分环节的作用是把偏差的积累作为输出。在控制的过程中,只要有偏差存在,积分环节的输出就会不断增大。直到偏差e(t)=0,输出的u(t)才可能维持在某一常量,是系统在给定值r(t)不变的条件下趋于稳态。微分环节的作用是组织偏差的变化。它是根据偏差的变化趋势(变化速度)进行控制。偏差变化的越快,微分控制器的输出就越大,并能在偏差值变化之前进行修正。微分作用的引入,将有助于减少超调量,克服震荡,使系统趋于稳定。
(2)瓦斯控制模块程序流程
瓦斯控制模块的流程如如图3.4.2.1-2所示:
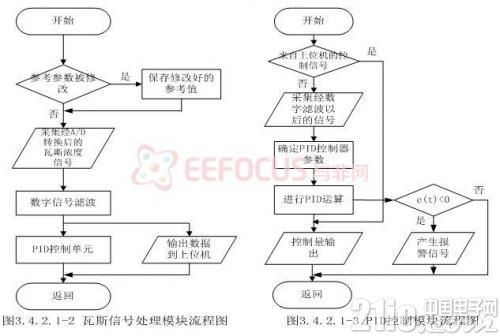
本程序在采样时刻到达以时,才会打开相关信号通道,在本模块中先采集瓦斯浓度信号,然后程序运行。
为了保证所设计产品的实用性和灵活性,允许其根据实际需要,因使用环境的不同或其它一些因素调节相应的初始参数。在程序的每次运行的开始都要检测是否有修改参数的请求,若有则保存修改后的参数,然后采集经A/D转换后的瓦斯浓度信号。通过数字信号滤波以后,将有用的信号传寄给PID控制单元,并通过网络模块上传到上位机。
数字滤波具有高精度、高可靠性、可程控改变特性或复用、便于集成等优点。常用的数字滤波方法有算数平均值滤波、中位值滤波、惯性滤波、加权平均值滤波和限幅滤波。从实际需要,本次设计采用的是算数平均值滤波。公式如下所示:
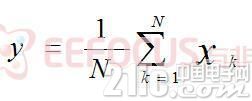
算数平均值滤波可以对周期脉动的采样值进行平滑加工。可以提高本次设计所采集数据的精确度。
(3)自动闭环过程控制模块框图
自动闭环控制过程如图3.4.2.1-4所示

PID算法的基本概念已经在(1)中介绍过,如图3.4.2.1-4整个过程为一个闭环控制。通过瓦斯浓度传感器检测到的浓度信号,经过模拟信号处理电路以后过滤掉干扰信号,然后经A/D转换器转换为便于MCU处理的数字信号。为了提高测量的精确度需要对数字信号进行滤波处理。经过数字滤波处理后,进入PID控制单元,控制信息经过D/A转换后成为模拟信号,为了对执行机构形成有力的驱动需要对其进行放大,因此添加了功率放大模块。这里执行机构主要指电机等电气设备,通过对其控制将被控对象(瓦斯)等控制在一个合理的范围,同时起到整体减少功耗的目的。
针对PID控制模块的程序实现,如图3.4.2.1-3所示。在本模块程序运行之前先要检测是否有来自于上位机的控制信号,若有,在跳过PID运算模块直接对被控量进行控制,否则,通过采集到得相关数据,自动的计算出用于PID运算的相关参数,然后利用这些参数进行PID运算,并产生信号量对被控端进行控制,努力使环境变量维持在正常水平。例如瓦斯浓度过高则加大通机转速,如瓦斯浓度正常维持通风机速率不变,若瓦斯浓度很低可以适度的降低通风机的转速以减小功耗。此外通过检测e(t)的大小判断瓦斯浓度是否超过正常值,若超过则产生报警信号。
3.4.2.2 图像信号处理
为了更快更好的网络中的传输图像,需要对采集到的信号进行压缩处理,压缩后的图像在保持不失真的情况下,可以降低网络流量,加快传输速度。
在综合考虑对采集到
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)