基于52单片机的智能小车的设计与制作
极管导通发光,光敏三极管导通呈低阻态(可以认为其短路),此时输出端输出低电压。由此可以看出通过光耦可以顺利地将数字电路的逻辑电压信号转换到模拟电路中。而L298是双H高电压大电流功率集成电路.直接采用11L逻辑电平控制.可以驱动继电器、直流电动机、步迸电动机等电感性负载。在此电路中L298连接保护电路根据单片机提供的逻辑电压对电机进行驱动。具体驱动方式如下:当使能端为高电平时。输人端1N1(IN3)为高电平信号,IN2(IN4)为低电平信号时,电机正转;输人端INl(IN3)为低电平信号,IN2(IN4)为高电平信号时,电机反转;INl(IN3)与IN2(IN4)相同时,电机快速停止。当使能端为低电平时.电动机停止转动。电机驱动采用的是PWM(脉宽调制)的方式。这是单片机上常用的模拟量输出方法,通过外接转换电路,可以将占空比不同的脉冲转换成不同的电压,以驱动直流电机转动从而得到不同的转速。PWM波的占空比越大,电机转动速度越快,当占空比达到100%时,速度达到最大。电路图如图七所示。

图七:电机驱动电路和光耦隔离电路图
2.4、舵机驱动
舵机驱动我们选择的是单片机的P2.6端口,在接到舵机之前我们也用了光耦来隔离数字电路和模拟电路,如图七所示。而舵机的连接电路也很简单,仅仅只有三根线:红线接5V电压,黑线接地,白线为信号控制线,接入单片机即可。舵机的内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。接口连接图如图八所示。
2.5、红外探测电路和金属传感器电路
红外探测采用的是GP2A25集成红外对管。其工作原理是当其检测到黑线,即发射管发射的信号被黑线吸收而不能接收时单片机的端口得到一个高电平,否则为低电平。金属传感器的原理和红外对管的原理相差无几。接口连接图如图八所示。

图八:舵机、红外以及金属探测器接口电路
3、程序部分
我所设计的三个红外对管探测地面的算法是:首先中间检测到黑线,则车直行,这时当黑线偏离时,左右的红外对管都有可能检测到。到检测到就向相应方向转。这时黑线必将到达中间的红外对管下面,车又直行。以下(图九)为程序流程图。
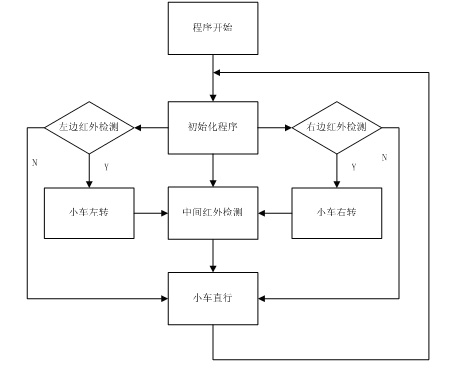
图九:程序流程图
程序有很多都是老师提供,只有红外巡线的程序是我自己编写,故我将此段程序写于附录之中。
4、调试部分
当电路板焊接好以后,首先是在不通电的情况下进行测试,看有无短路断路问题存在。还好,我此次焊接的电路板并没有这种问题。下一步就是通电测试了。主要是看单片机有没有起振,有没有开始工作,各管脚的电压值等等啊。还好,一切正常。第三步就是烧写程序以后的程序测试了。这也是耗费我最多时间的地方。在测试中,我先是发现自己的电路数字电路和模拟电路的相互干扰特别严重,舵机在工作的时候会很颤。于是我把电路分离开,重新测试。这时在测试的过程中我先后发现了其中一个直流电机存在问题,舵机也坏了。我又更换它们再次测试。
在整个测试过程中,我收获颇丰。以前没有调试过舵机,这次终于在自己的努力和老师的不吝赐教下学会了如何调试舵机。还有就是对整个电路系统的把握上也得到了很大的提高。
5、总结
看到小车比赛的视频或是现场的比赛,勾起了儿时的美好回忆,兴起了自己动手制作智能巡迹小车的念头。曾经还认为小车的硬件部分应该是比较简单的,通过自己的实践才明白,从小车的整体构思设计到每个零件的设计和加工,都蕴含了机械设计的各项原则,满足性能要求,经济、可靠、外形美观的诸多限制。
在小车转向方面,我们认真研究了阿克曼原理并查阅了相关的资料最终采用解析法确定了平面等腰梯形四双摇杆机构,实现了小车转向时灵敏、准确,纯滚动无滑动的完美结构。
电路方面,我们的收获也很大。不仅锻炼了自己在电路板焊接、测试方面的能力,包括了检查错误,改正错误的能力;还学习了单片机的有关知识,这其中包括了直流电机、舵机、红外巡线等方面的知识。
总之,在这两周的学习中,我们收获颇丰。锻炼了自己的动手动脑能力,还学习了好多理论知识,而且这是理论和实践的完美结合。
参考文献:
周 彬. 基于Proteus的单片机PWM直流调速系统设计.重庆职业技术学院学报,2007(7).
郭天祥。51单片机C语言教程——入门、提高、开发、拓展全攻略。电子工业出版社。2009.1
陈立德。机械设计基础(第二版)。高等教育出版社。
- 一种基于DDS技术的信号发生器研究与实现(03-30)
- 基于CC8520嵌入式无线音频传输系统方案(07-30)
- 基于AT89S52嵌入式系统智能机器人设计方案(11-28)
- 基于AT89S52单片机的温度监测系统的设计(01-10)
- 基于STC89C52的智能印章机的设计方案(01-13)
- 一种AT89S52的USB下载线设计(03-03)