linux设备模型之uart驱动架构分析
样做是为了在用户空间对设备文件的操作时,很容易转到对应的uart_driver.
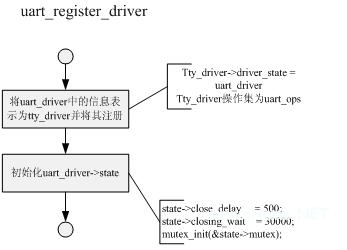
另外:tty_driver的flags成员值为: TTY_DRIVER_REAL_RAW | TTY_DRIVER_DYNAMIC_DEV.里面包含有TTY_DRIVER_DYNAMIC_DEV标志。结合之前对tty的分析。如果包含有这个标志,是不会在初始化的时候去注册device.也就是说在/dev/下没有动态生成结点(如果是/dev下静态创建了这个结点就另当别论了^_^)。
流程图如下:
五: uart_add_one_port()操作
在前面提到。在对uart设备文件过程中。会将操作转换到对应的port上,这个port跟uart_driver是怎么关联起来的呢?这就是uart_add_ont_port()的主要工作了。
顾名思义,这个函数是在uart_driver增加一个port.代码如下:
int uart_add_one_port(struct uart_driver *drv, struct uart_port *port)
{
struct uart_state *state;
int ret = 0;
struct device *tty_dev;
BUG_ON(in_interrupt());
if (port->line >= drv->nr)
return -EINVAL;
state = drv->state + port->line;
mutex_lock(port_mutex);
mutex_lock(state->mutex);
if (state->port) {
ret = -EINVAL;
goto out;
}
state->port = port;
state->pm_state = -1;
port->cons = drv->cons;
port->info = state->info;
/*
* If this port is a console, then the spinlock is already
* initialised.
*/
if (!(uart_console(port) (port->cons->flags CON_ENABLED))) {
spin_lock_init(port->lock);
lockdep_set_class(port->lock, port_lock_key);
}
uart_configure_port(drv, state, port);
/*
* Register the port whether it's detected or not. This allows
* setserial to be used to alter this ports parameters.
*/
tty_dev = tty_register_device(drv->tty_driver, port->line, port->dev);
if (likely(!IS_ERR(tty_dev))) {
device_can_wakeup(tty_dev) = 1;
device_set_wakeup_enable(tty_dev, 0);
} else
printk(KERN_ERR Cannot register tty device on line %d\n,
port->line);
/*
* Ensure UPF_DEAD is not set.
*/
port->flags = ~UPF_DEAD;
out:
mutex_unlock(state->mutex);
mutex_unlock(port_mutex);
return ret;
}
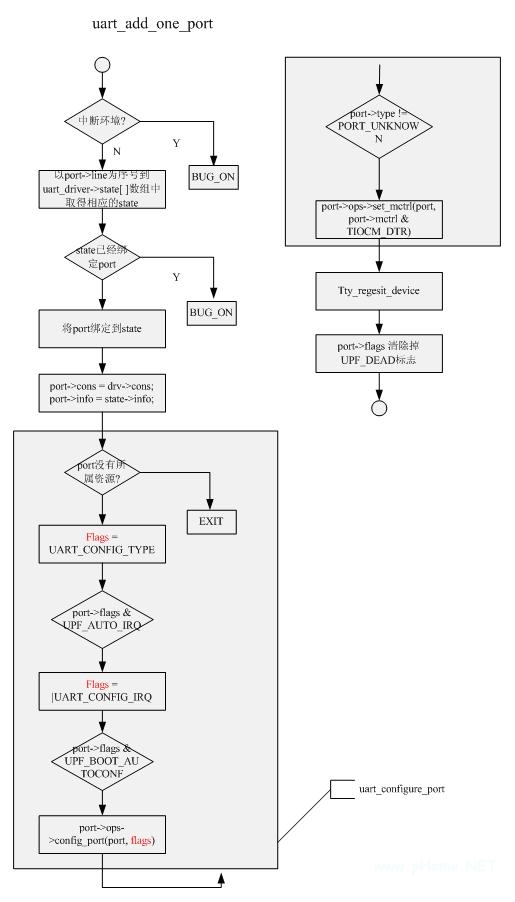
首先这个函数不能在中断环境中使用。 Uart_port->line就是对uart设备文件序号。它对应的也就是uart_driver->state数组中的uart_port->line项。
它主要初始化对应uart_driver->state项。接着调用uart_configure_port()进行port的自动配置。然后注册tty_device.如果用户空间运行了udev或者已经配置好了hotplug.就会在/dev下自动生成设备文件了。
操作流程图如下所示:
六:设备节点的open操作
在用户空间执行open操作的时候,就会执行uart_ops->open. Uart_ops的定义如下:
static const struct tty_operations uart_ops = {
.open = uart_open,
.close = uart_close,
.write = uart_write,
.put_char = uart_put_char,
.flush_chars = uart_flush_chars,
.write_room = uart_write_room,
.chars_in_buffer= uart_chars_in_buffer,
.flush_buffer = uart_flush_buffer,
.ioctl = uart_ioctl,
.throttle = uart_throttle,
.unthrottle = uart_unthrottle,
.send_xchar = uart_send_xchar,
.set_termios = uart_set_termios,
.stop = uart_stop,
.start = uart_start,
.hangup = uart_hangup,
.break_ctl = uart_break_ctl,
.wait_until_sent= uart_wait_until_sent,
#ifdef CONFIG_PROC_FS
.read_proc = uart_read_proc,
#endif
.tiocmget = uart_tiocmget,
.tiocmset = uart_tiocmset,
};
对应open的操作接口为uart_open.代码如下:
static int uart_open(struct tty_struct *tty, struct file *filp)
{
struct uart_driver *drv = (struct uart_driver *)tty->driver->driver_state;
struct uart_state *state;
int retval, line = tty->index;
BUG_ON(!kernel_locked());
pr_debug(uart_open(%d) called\n, line);
/*
* tty->driver->num won't change, so we won't fail here with
* tty->driver_data set to something non-NULL (and therefore
* we won't get caught by uart_close())。
*/
retval = -ENODEV;
if (line >= tty->driver->num)
goto fail;
/*
* We take the semaphore inside uart_get to guarantee that we won't
* be re-entered while allocating the info structure, or while we
* request any
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)