基于ARM-Linux的MAX1303接口与驱动程序设计
简单。本系统有两路模拟信号需要采集,使用单端输入,MAX1303的另外两个输入端接地。LPC3250与MAX1303的硬件连接如图2所示。
3 Linux下设备驱动程序设计
设备驱动程序是应用程序和硬件之间的桥梁,它为应用程序屏蔽硬件细节,并将硬件封装成一个文件的形式。当应用程序需要操作硬件时,只需操作硬件相对应的设备文件即可。Linux对设备的分类有许多种,常见的分类是将设备分成3种:字符设备、块设备、网络设备。这三类设备对应3种设备文件。不同设备的开发模式以及与内核的接口也不相同。MAX1303属于字符设备,本文将分析Linux2.6.29内核下MAX 1303的字符设备驱动设计方法。
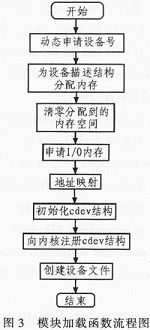
设备驱动程序与应用程序不同,应用程序从main函数开始执行,而驱动程序在被安装时,则是从module_init宏指定的函数处开始执行。module_init宏指定的函数被称为模块加载函数,它可以看成是驱动程序的入口。它通常完成地址映射,向内核注册并初始化cdev结构,创建设备文件等工作。模块加载函数的程序流程图如图3所示。
与模块加载函数对应的,有一个模块卸载函数,此函数由module_exit宏指定,它在驱动模块被卸载时执行。它主要完成的工作包括:销毁设备文件;注销设备所对应的cdev结构;释放内存;注销设备号。
Struct cdev在内核内部被用来表示设备,这是一个非常重要的数据结构。它内部有一个成员结构structfile_operations,用于连接设备编号和驱动程序的操作。这个数据结构包含一组函数指针,这一组函数的实现是设计驱动程序的重点和难点。这一组函数有很多,但根据项目需求,本系统只实现open,write,read,release 4个函数。
结构struct file_operations中的open字段对应着系统调用中的open函数。在应用程序中,通过open函数打开MAX1303对应的设备文件时,内核会跳转到此函数指针处。此函数指针的实现,主要完成初始化工作。这包括MAX1303的初始化配置和LPC3250驱动相关的寄存器设置。MAX1303的初始化包括工作模式选择、量程范围选择、单端/差分输入选择、初始化通道选择。对于这四项,本系统全部使用默认设置:外部时钟模式;-Vref到+Vref的测量范围;单端输入;初始化输入通道0。所以,在open中不用配置MAX1303。对LPC3250的寄存器配置也比较简单,需要完成的配置有:片选信号拉高;时钟信号拉低;处理器输出拉低。
Write字段需要接收应用程序从用户空间传递到内核的的数据,然后将此数据通过GPO_17端口发送给MAX1303。这些数据主要用于修改MAX1303的配置,例如通道选择。向MAX1303写数据时需要注意MAX1303电气特性中的两个时间参数Tcss和Tcspw。Tcss对应着芯片的片选信号被拉低后到第一个时钟到来前所必需的时间间隔。Tcspw对应着写模拟输入配置字节、模式控制字节、转换启动字节时,任意两者之间的时间间隔。这两个时间参数都必须大于40 ns,且没有上限。本系统中,在Read中写转换启动字节,write中只做通道的切换,其他配置都使用默认的。
Read字段是MAX1303驱动的关键点。它负责读取采样结果,并将结果传递给应用程序。在read中,首先是用8个时钟向MAX1303写转换起始字节,然后使用8个是时钟周期等待AD转换完成。最后使用16个时钟周期读取MAX1303输出的转换结果。由于转换结果是以串行方式输出,故需要将读取的数据拼凑起来。又由于ARM使用的是端口3的GPI_06管脚读取MAX1303的输出数据,且对于端口3的操作是以32位进行的,所以还需要考虑拼接端口3的哪个数据位。本文的处理方式是先将端口3读出的数据右移6位。具体的操作代码如下: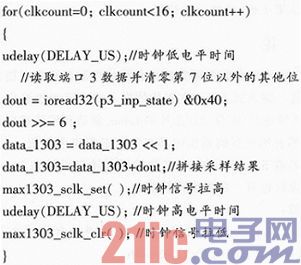
release对应着系统调用中的close函数。它需要完成这个驱动所涉及的配置寄存器的复位,操作过程与open相反。在还原寄存器的默认设置后,打印一条设备文件关闭的信息,供应用程序开发者调试时观察使用。
4 Linux应用程序设计与测试
本文介绍的应用程序是整个系统的一部分,这里仅供测试驱动程序使用。测试的功能主要是驱动中的write和read功能。由于驱动程序的read中没有对读取的采样值做处理,所以得到的数据还不是输入信号的实际值,应用程序必须对数据进行处理。由于MAX1303采用单端、双极性输入,所以处理公式为:
式中,实际值的单位是毫伏;采样值是从MAX1303读取的数据;FSR是满量程范围,对于本系统,FSR是2*Vref;本系统采用内部电压基准,Vref的理论值是4.096 V,但实际系统中会有一定的漂移,范围一般在4.056 V到4.136 V之间。
为了测试,应用程序每秒读取一次两个通道的数据,并打印。应用程序的流程图如图4所示。
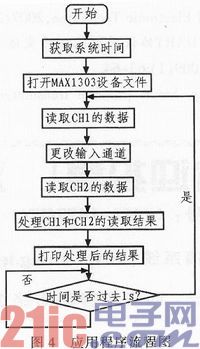
根据应用程序的打印结果和CH1、CH
ARM-Linux MAX1303 接口 驱动程序 相关文章:
- 建立针对arm-linux的交叉编译环境(02-07)
- ARM-Linux平台下GPS信号的采集与处理研究(07-25)
- 浅析gcc、arm-linux-gcc和arm-elf-gcc的关系(11-22)
- Arm-linux下USB摄像头的视频服务器的实现(11-21)
- 关于arm-linux-gcc4.4.3在ubuntu11.10下的安装(11-21)
- 安装配置arm-linux-gcc(11-21)