一种基于单片机的移动目标监控系统研究
图像的亮度特征图与颜色特征图后,采用不同的权重分量叠加图像便可得到图像的显著图,这里我们用ω1和ω2来分别表示图像的颜色特征分量与亮度特征分量,用T(S)来表示图像的显著特征图,则T(S)可表示为:
T(S)=ω1C(S)+ω2I(S) (4)
本系统图像处理部分采用单片机AT89552来作为主控芯片,通过网络摄像机捕捉图像,对采集到的图像通过视频信号接收器编解码芯片将图像直接转换为 YCrCb格式图像,其中Y为图像亮度,Cr和Cb分别为图像的色度,根据彩色图像像素点三基色合成原理(如公式(5))可计算得到RGB格式图像,根据公式(1)~(4),分别提取出图像的的颜色特征与亮度特征,最终得到我们感兴趣目标物的显著特征图。
R=Y+1.40(Cr-128)
G=Y-0.34(Cb-128)-0.71(Cr-128) (5)
B=Y+1.77(Cb-128)
为了提高单片机的工作效率,减小单片机的运算量,现设置图像S的尺度为1,3,7。则在这3个尺度上先分别提取出图像的亮度特征与颜色特征,然后对特征图分别用二维高斯差函数进行卷积运算,并把卷积结果叠加回原特征图,最后使用阈值分割算法来提取移动目标物体。为了检验该方法的有效性,文中使用 MATLAB软件对本系统进行了模拟仿真仿真如图3所示。该仿真表明使用本文简化的Itti算法,能够满足系统对移动目标的提取要求。

2.2 移动目标物质心与相似度
要想有效的跟踪到目标物,最重要的是要检测出目标物在图像画面中的位置变化,本文采用计算目标物的质心来锁定目标的位置,当目标物发生移动时,则当前帧图像质心将会与前一参考帧图像质心发生较明显的偏移。根据图像区域几何特征不变矩描述理论,图像的质心计算可表示为:
(式中,N为非负整数,(xd,yd)分别为第z幅图像中移动目标图像的横纵质心坐标)
在处理动态的视频图像时,由于移动目标图像要受到外部的环境影响(例如灰尘,噪声,光照等)导致计算出的质心点位置不稳,所以在计算前一参考帧的图像质心十分重要,本系统采用捕获前n帧视频图像并进行差值处理来作为当前画面感兴趣移动目标的基准质心坐标。
设
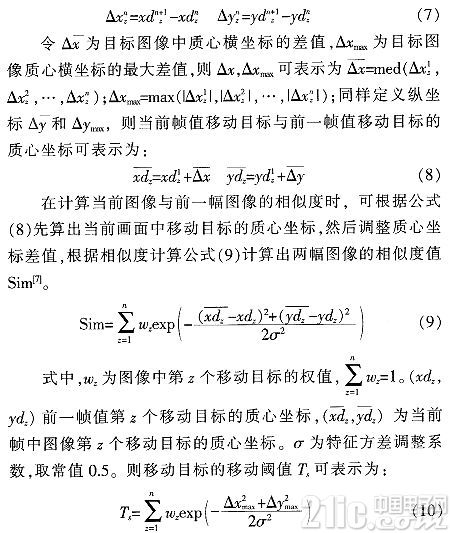
为第n帧图像中第z个移动目标的质心横纵坐标,则相对前一幅图像值的质心坐标差值可表示为:

当当前画面中所跟踪的移动目标与前一幅画面移动目标的相似度Sim大于移动阈值Ts则主控制板立即修改当前质心坐标,一边跟进新的移动目标物。
3 系统仿真
为了检验系统的有效性,系统在Windows7 Professional微机上运行,软件算法仿真环境为Matlab2009a。
1)移动目标检测。为了得到先验统计数据,我们先使用Matlab软件对100幅前期采集图像进行运算与记录,也就是说,将图像面积为12096控制在监控设备(面积720576)的画面中,这样可得到一组较为理想的先验统计数据。为了降低运算量和提高系统处理效率,在计算监控画面时这里去除了移动目标以外的区域。
设定移动目标检测图像帧数n为10帧,对公路上100个真实目标物进行检测并调整上式(4)不同的颜色特征分量与亮度特征分量值。检测结果如表1所示。
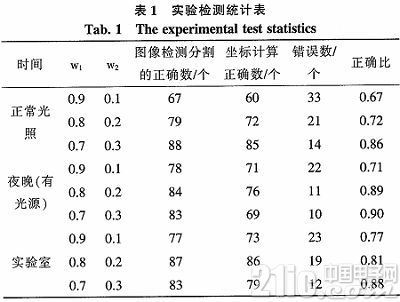
以上数据表明:由于外界环境的干扰,在实验室条件下,移动目标物的分割正确比较理想。当取特征分量权值w1=0.7和w2=-0.3时,采集到的视频画面中移动目标检测分割正确率最高,平均可达到87.7%。
2)图像实时跟踪部分。如前所述,现实监控环境中存在诸多干扰,系统有可能会出现误判与跟丢目标物的现象,为了解决这种情况,必须调整上位机定时时间Ti,当本次跟踪定时结束时,立即更新数据,重新加载目标物检测与分割。
为了检验数据的的正确性,我们对摄像机采集到的图像进行了分析,系统在60 s中共采集了1 420帧图像,差不多每帧图像处理时间为24 mS左右,每秒处理23帧图像,基本上可以满足实时图像处理。实验记录结果如表2所示。
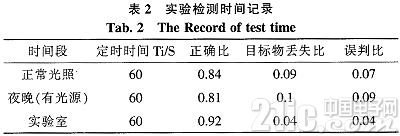
从表2可以看出,在规定的时间段中,系统对跟踪的移动目标物正确分割维持在81%以上。
3)系统整体测试。在本系统中,系统以我市内公路上移动的汽车为例进行了跟踪测试。首先根据公式(10)设定移动阈值Ts,然后采集图像并对图像进行区域检测与分割,得到图像显著图,然后计算图像的质心坐标与相似度Sim,当移动阈值Ts有变动时,立即更新芯片数据,重新计算质心坐标与相似度Sim。下面是我市拍摄到的监控图像,图4(a)双向前进中的汽车,当我们所感兴趣的4辆汽车移动到(b)所在的位置时,由于(a)图中左边的第1辆汽车跨越了监控区,系统则立即更新数据跟踪到随后而来的第2辆汽车,而在(a)图中右边的2辆汽车一直在系统的监控范围,只是画面中的移动目标质心发生了变化,所以系统跟新数据后有效的锁定了目标。
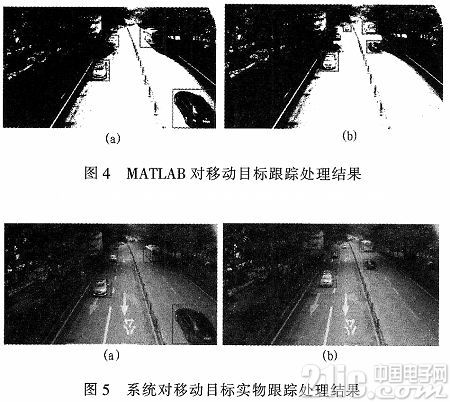
图5为本系统对实物小汽车
单片机 Itti模型显著图 图像分割与检测 图像质心 相似度 相关文章:
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)