基于AVR和无线技术的远程水情监控系统
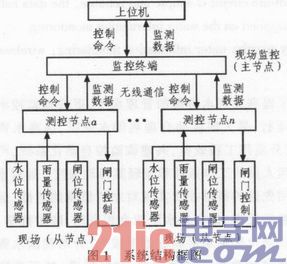
上位机负责连接各个监控终端,并将由管理员设置的各种采集命令转化为监控终端可以接受的形式发送至监控终端,并能识别由监控终端传来的响应信号,如果是数据,将数据发送给入库处理部分;如果是响应报文,就将其传送给界面处理部分。同时该部分还需要记录操作日志,对管理员进行的各项操作以及采集过程中发生的各种异常事件进行记录,供管理员以后查询。
监控终端主要负责定时与中心站进行连接,并能识别其传来的各种命令,根据命令进行响应操作。如果是数据采集命令,将数据封装成规定格式,发送给上位机;如果是操作命令,就进行相应操作,在操作完成之后,并将操作的结果返回给上位机。
测控模块负责识别各类传感器的信号,采集并将其转换为系统所需要的数据形式,并能临时存储。同时根据本系统设计的通信协议,接收监控终端发来的命令,完成数据传输或闸门电路启闭控制。
5 系统关键设备的硬件设计
本系统是软硬件的综合体,设计中注重软硬件的功能分配。系统中的关键设备是指现场测控模块(从节点)和监控终端(主节点),主要包含数据采集单元、闸门控制电路、电源、无线收发单元以及其它外围电路。系统采用分层的设计结构,底层控制电路由AVR单片机负责,主要实现对从节点以及闸门启闭电路的控制,并负责与上位机进行通讯。根据各部分的功能要求。
5.1 从节点硬件设计
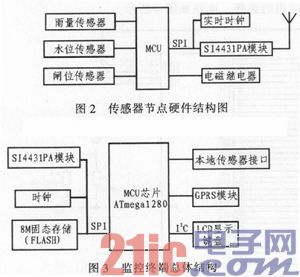
从节点主要包括4个部分:数据采集单元(传感器)、控制单元(继电器电路)、数据传输单元(SI4431PA)和实时时钟,如图2所示。
5.1.1 数据采集单元
传感器作为信息采集的主力军,担任着对水情和闸位多方面的参数测量。主要的传感器有水位计、雨量计和闸位传感器。测点的环境一般情况下很恶劣,传感器会被暴露在水中或大气中,因此必须能够有很强的环境适应能力和易维护特性。
1)雨量传感器
系统选用DY1090A型翻斗式雨量计,主要由简身、底座和内部翻斗3部分构成。雨量分辨率为1 mm,测量准确度为±3%,触点接触次数可达107次。工作原理为:降水进入筒身上部的承雨口首先经过防虫网过滤并清除污物,接着进入翻斗。当翻斗内的水量达到规定量时,翻斗立即自行翻转。在翻斗翻转过程中,磁钢和干簧管会发生相对运动,从而使得干簧管接点处的状态改变,输出电信号。输出的是干簧管机械接触的通断状态,接出的两根连接线组成开关量输出。干簧管通断信号一次代表翻斗翻转一次,即代表一个分辨率的雨量。雨量传感器本身输出为开关信号,连接至单片的引脚,利用计数器统计低电平次数,当然在每次读取后应及时复位该芯片。翻斗式雨量计本身是无需电源供电便能工作的,由于在使用时要产生、处理和接收信号,因此仍需外部电源,但是可以跟系统其它设备共用电源。
2)水位/闸位传感器
进行水位自动测量时,传统的用于人工观读的水尺和浮子式自记水位计已不能胜任,因为它们的水位输出不能接入自动化测量设备。现有的遥测水位计的感应方式主要有浮子式、压力式或是非接触式等。本系统选用南京水利水文自动化研究所研制的WFH-2型水位传感器。WFH-2型水位计水位分辨率为1 cm,结构简单、精度高、稳定性同时价格较便宜,更重要的是它是无源的,不易受外界干扰,无掉电、雷击危险,长期准确运行时不需要特别的维护。其工作原理是:在水位测站水位计井台的测井中,安装一个浮子,作为水位感测元件。水位发生变化时,浮子灵敏地响应水位变化并作相应的涨落运动,同时把此水位涨落的直线运动借助悬索传递给水位轮,使水位轮产生圆周运动,并准确地将直线位移换为相应的角位移量。水位轮枢轴就是轴角编码器输入轴,因此,当水位旋转的同时,轴角编码器已将水位模拟量A转换,并编码成相应的数字编码D。
5.1.2 单片机
单片机作为节点内部的控制中心,主要负责节点的数据采集以及闸门启闭控制。因此,MCU必须考虑指令执行速度、功率消耗、强大的外围电路和可用存储空间等因素。
综合节点设计要求,对于MCU的主要要求为:1)由于系统是建立是实时采集的基础上,因此对于单片机的处理速度要求比较高;2)系统采用周期性休眠唤醒的工作调度方式,而大部分时间来讲,节点是处于休眠状态的,因此对于睡眠模式的功耗尽量要低;3)节点供电方式为蓄电池供电,因此芯片功耗应尽可能低。
本系统选用Atmega169L,电源管理方面,Atmega169L采用3.3 V供电电压,已具备基本低功耗要求,对于典型功耗情况,WDT关闭时为100hA,适用于电池供电的应用设备。Atmega169L单片机以时钟周期为指令周期,16 MHz时性能可达16MIPS。单片机的FLASH、EEPROM蓄存器都可以反复烧写、支持在ISP在线编程(烧写);片内集成多种功能电路,电路设计非常简单;单片机具有休眠省电功能(POWERDOWN)及闲置(IDLE)低功耗功能,一般耗电在1~2.5 mA,电源抗干扰性强,可降低一般8位机中软件抗干扰的设计工作量和硬件的使用量。本系统主要用到功能包括SPI、USART、中断、定时器/计数器等。
5.2 主节点硬件设计
监控终端针对分布距离远且分散的系统,承载着数据接收、存储和通信控制等任务。传感器输出的信号转化为数字量经无线收发模块发送后,进入监控终端MCU的数字量输入口。其主要由AVR微处理器、无线收发模块、GPRS模块、显示模块、时钟模块等构成,由无线收发模块采集到各监测点的无线电信号后,输送到AVR微处理器转化成数字信息,经GPRS模块发射到监控中心;监控中心发来的控制信号由GPRS模块接收,传送到AVR微处理器转化成相应的数字信号,监控终端再将这些命令传送至从节点,完成取数或设备控制的操作。可实现连续不间断地对监控对象实时远程监控,适用于地理环境恶劣、无人值守的监控环境。由于监控终端的功能要求较高,因此在单片机选型上,选择功能更为强大的ATmega1280,总体结构如图3所示。
5.3 人机接口模块
监控系统中,为方便管理人员查询已经采集到的数据以及检查设备的运行状态,可以通过键盘对终端设备内部的参数、功能等进行快速设置,再加上液晶显示屏的数据显示,体现了人机交互的友好性。
5.3.1 键盘
系统采用了简单键盘进行时间调整、菜单选择和输入控制参数等操作,键值与按键功能对应关系为OK、FUNCTION、UP、DOWN、LEFT、RIGHT和ESC。由于芯片I/O口有限,系统将选用PCF8574作为I/O输出的扩展芯片。PCF8574是单片的CMOS电路,具有8位准双向口和I2C总线接口。具有功耗低,输出锁存,驱动能力大等特点,同时存在中断请求线,可直接连到单片机的中断输入端。
5.3.2 LCD显示
为了更直观的看到采集到的信息,系统使用LCD显示器用于显示水位、雨量、采集时间、站号和通讯设备状态等信息。为满足系统显示要求,专门定做了4x40的LCD显示屏,电路设计时,使用单片通用低复用率LCD驱动器PCF8576D,它可为任何静态或多路LCD提供驱动信号,带电压跟随缓冲器的内部LCD偏压电路,40x4的RAM显示数据存储器,含有4路背电极输出和40路段输出,同时无需连接外部元器件,通过双向“二线”的I2C总线与MCU进行通信,电路更加简单。将芯片的OSC与VSS引脚相连来使用内部振荡,器件内部可产生多路复用LCD所需的合适偏压。最后将各种电源信号以及所选的LCD电源输入连接好就可完成系统应用的连接。电路如图4所示。
- 因为发明,无线技术让生活更酷更美(12-21)
- 无线技术改变仓库和工厂(12-21)
- 基于ZigBee无线技术的电器温度监控系统研究(02-16)
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 基于AVR单片机的服装压力检测系统设计(05-03)