ARM 的Thumb状态测试
带着这些问题,我就Thumb状态写了一个简单的程序以作测试。测试平台是ADS1.2,先贴上测试代码。
GET2440addr.inc
AREAInit,CODE,READONLY
CODE32
ENTRY
EXPORT__ENTRY
__ENTRY
bResetHandler
bHandlerUndef;handlerforUndefinedmode
bHandlerSWI;handlerforSWIinterrupt
bHandlerPabort;handlerforPAbort
bHandlerDabort;handlerforDAbort
b.;reserved
bHandlerIRQ;handlerforIRQinterrupt
bHandlerFIQ;handlerforFIQinterrupt
HandlerFIQ
b.
HandlerIRQ
b.
HandlerUndef
b.
HandlerSWI
b.
HandlerDabort
b.
HandlerPabort
b.
ResetHandler
ldrr0,=WTCON;watchdogdisable
ldrr1,=0x0
strr1,[r0]
movr1,#0x34
ldrr0,=ThumbState+1
bxr0
CODE16
ThumbState
addr0,r0,r1
ldrr0,=HandlerFIQ
ldrr0,[r0]
ldrr0,=BackARM
bxr0
CODE32
ALIGN
BackARM
ldrr0,=GPFCON
ldrr1,=0x55aa
strr1,[r0]
ldrr0,=GPFDAT
ldrr1,=0x0
strr1,[r0];
b.
END
我们在看一下反汇编代码。
__ENTRY [0xea00c]bResetHandler
04 [0xea007]bHandlerUndef
08 [0xea007]bHandlerSWI
0c [0xea008]bHandlerPabort
10 [0xea006]bHandlerDabort
14 [0xeafffffe]b0x14;(__ENTRY+0x14)
18 [0xea001]bHandlerIRQ
1c [0xeaffffff]bHandlerFIQ
HandlerFIQ[0xeafffffe]bHandlerFIQ
HandlerIRQ [0xeafffffe]bHandlerIRQ
HandlerUndef[0xeafffffe]bHandlerUndef
HandlerSWI[0xeafffffe]bHandlerSWI
HandlerDabort[0xeafffffe]bHandlerDabort
HandlerPabort[0xeafffffe]bHandlerPabort
ResetHandler[0xe3a00453]movr0,#0x53
3c [0xe3a01]movr1,#0
40 [0xe5801]strr1,[r0,#0]
44 [0xe3a015d0]movr1,#0x34
48 [0xe59f0028]ldrr0,0x78;=#0x51
4c [0xe12fff10]bxr0
ThumbState [0x1840]addr0,r0,r1
52 [0x480a]ldrr0,0x7c;=#0x20
54 [0x6800]ldrr0,[r0,#0]
56 [0x480a]ldrr0,0x80;=#0x5c
58 [0x4700]bxr0
5a [0x0]dcw0x (说明:为了使下边的CODE32代码4字节对齐起到占位作用)
BackARM [0xe59f0020]ldrr0,0x84;=#0x56050
60 [0xe59f1020]ldrr1,0x88;=#0x055aa
64 [0xe5801]strr1,[r0,#0]
68 [0xe59f001c]ldrr0,0x8c;=#0x56054
6c [0xe3a01]movr1,#0
70 [0xe5801]strr1,[r0,#0]
74 [0xeafffffe]b0x74;(BackARM+0x18)
下边,我再贴出用AXD调试过程中的现象。
mov r1,#0x34;运行后r1=0x34分析结果,"add r0,r0,r1;运行后r0=0x34051"说明加法运算是32位的,也就是说CPU在Thumb状态还是32位的,还能说明寄存器也是32位的,并非16位的。"ldr r0,[r0];运行后r0=0xeafffffe"也说明了寄存器仍然与ARM状态一样是32位的。
ldr r0,=ThumbState+1;运行后r0=x51
bxr0;跳转到Thumbstate位置处执行,并且切换处理器到Thumb状态
CODE16
ThumbState;pc = x50
add r0,r0,r1;运行后r0=0x34051
ldr r0,=HandlerFIQ ;运行后r0=0x0x20
ldr r0,[r0];运行后r0=0xeafffffe
ldr r0,=BackARM
bxr0
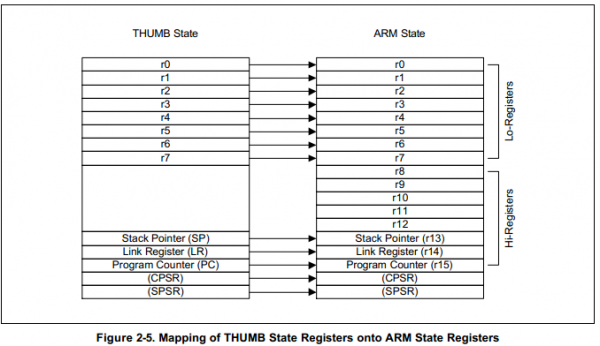
结论:虽然,ARM的Thumb状态的指令是16位的,但是CPU还是32位的,而且寄存器也是32位的。所以,Thumb状态最大的区别就是指令变成16位的,寄存器少了一点,其他没什么变化。
附上ARM的Thumb状态与ARM状态寄存器的对应关系图
懂得的越多,越是无知
ARMThumb状态测 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)