深入理解ARM体系架构(S3C6410)---PWM实例
The S3C6410X RISC microprocessorcomprises of five 32-bit timers. These timers are used to generate internal interruptsto the ARM subsystem. In addition, Timers 0 and 1 include a PWM function (PulseWidth Modulation),which can drive an external I/O signal. The PWM for timer 0and 1 have an optional dead-zone generator capability, which can be utilized tosupport a large current device. Timer 2, 3 and 4 are internal timers with no outputpins.
PWM具有两种操作模式:自动装载模式,一次触发模式。为实现PWM功能,芯片提供了16个功能寄存器。这些功能寄存器都连接APB总线。
总体架构图如下:
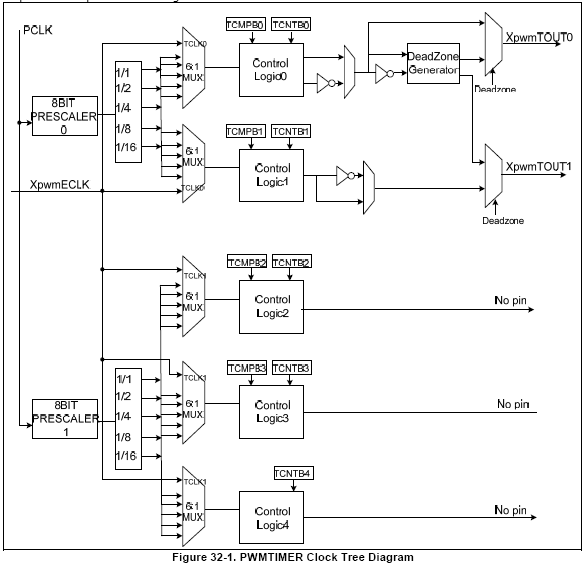
S3C6410X中有5个定时器,这些定时器产生内部中断。其中,Timer0和Timer1具有PWM功能,而Timer2,3,4没有此功能。定时器具有双缓冲特性,这样就能在不停止当前定时器操作的情况下,为下次定时器运行装入新的数值。尽管为定时器设置了新数值,但当前的定时操作能够成功完成。定时器从TCNTBn读取的值是为下次延时定时用的,并不影响当前定时器的运行。当TCNTn减小到0的时候,TCNTBn的值会自动复制到TCNTn中,这就是说的自动装载操作。定时器的当前技术数值可以从定时计数观察寄存器中TCNTOn读取。如果TCNTn为0且从装载也为0的话则TCNTn不在进行下次操作。
寄存器介绍:
1、总寄存器映射图

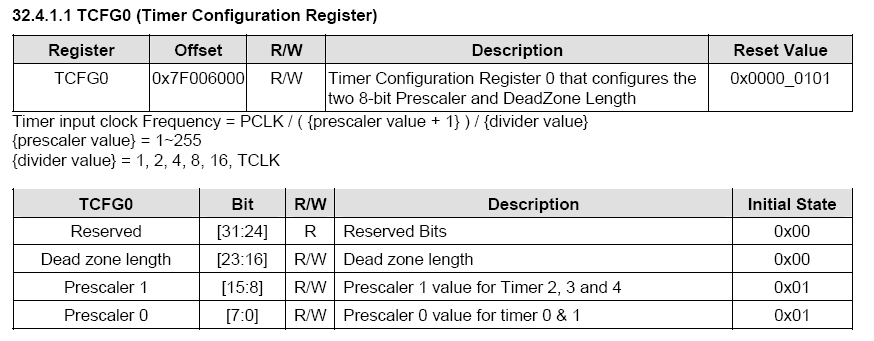
2、TCFG0寄存器:
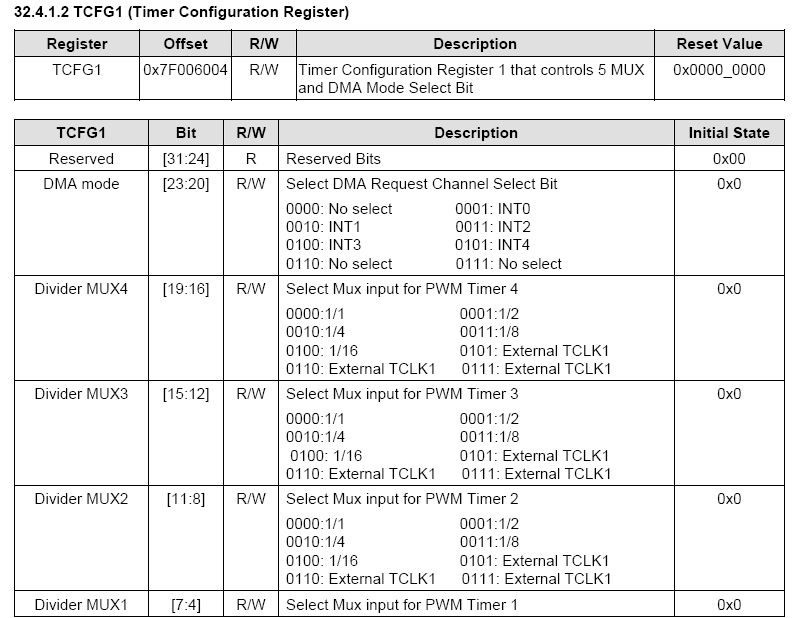
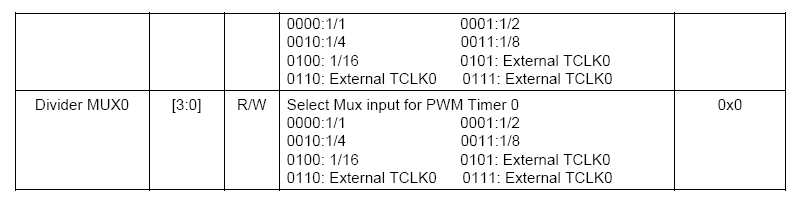
3、TCFG1寄存器:
4、TCON控制寄存器:

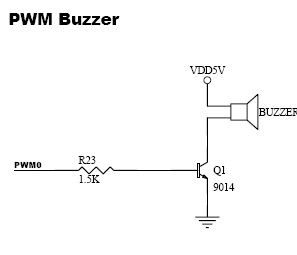
mini6410蜂鸣器原理图:
定义寄存器:
- #define
rTCFG0 (*(volatile unsigned *)(0x7F006000)) - #define
rTCFG1 (*(volatile unsigned *)(0x7F006004)) - #define
rTCON (*(volatile unsigned *)(0x7F006008)) - #define
rTCNTB0 (*(volatile unsigned *)(0x7F00600C)) - #define
rTCMPB0 (*(volatile unsigned *)(0x7F006010)) - #define
rTCNTO0 (*(volatile unsigned *)(0x7F006014)) - #define
rTCNTB1 (*(volatile unsigned *)(0x7F006018)) - #define
rTCMPB1 (*(volatile unsigned *)(0x7F00601c)) - #define
rTCNTO1 (*(volatile unsigned *)(0x7F006020)) - #define
rTCNTB2 (*(volatile unsigned *)(0x7F006024)) - #define
rTCNTO2 (*(volatile unsigned *)(0x7F00602c)) - #define
rTCNTB3 (*(volatile unsigned *)(0x7F006030)) - #define
rTCNTO3 (*(volatile unsigned *)(0x7F006038)) - #define
rTCNTB4 (*(volatile unsigned *)(0x7F00603c)) - #define
rTCNTO4 (*(volatile unsigned *)(0x7F006040)) - #define
rTINT_CSTAT (*(volatile unsigned *)(0x7F006044))
编写初始化函数:
- void
init_pwm() - {
rGPFCON &= ~(0x3U 28); rGPFCON |= (0x2U 28); rTCFG0 &= ~0xff; rTCFG0 |= (50 - 1); rTCFG1 = 0x4; #define freq 800 rTCNTB0 = (133000000/50/16)/freq; rTCMPB0 = rTCNTB0/2; rTCON &= ~0x1f; rTCON |= 0xb; //disable deadzone, auto-reload, inv-off, update TCNTB0&TCMPB0, start timer 0 rTCON &= ~2; //clear manual update bit - }
在main函数中:
- init_pwm();
- while(1);
ARM体系架构S3C6410PW 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)