STM32的定时器是个强大的模块,定时器使用的频率也是很高的,定时器可以做一些基本的定时,还可以做PWM输出或者输入捕获功能。从系统框架图下看,名为TIMx的有八个,其中TIM1和TIM8挂在APB2
总线上,而TIM2-TIM7则挂在APB1总线上。其中TIM1&TIM8称为高级控制定时器(advanced control timer).他们所在的APB2总线也比APB1总线要好。APB2可以工作在72MHz下,而APB1最大是36MHz。
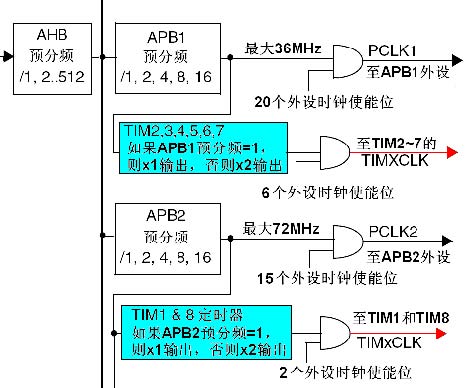
由上图可知,当APB1 的预分频系数为1 时,这个倍频器不起作用,定时器的时钟频率等于APB1 的频率;当APB1的预分频系数为其它数值(即预分频系数为2、4、8 或16)时,这个倍频器起作用,定时器的时钟频率等于APB1 的频率两倍。也就是,当APB1不分频,TIM3的时钟速度为36MHz,当2分频是,APB1变成18MHz,但是TIM又会倍频,即TIM时钟等于18*2=36MHz。这里我们用向上计数的方式,即TIMx_CNT中的计数值达到TIMx_ARR中的值时,产生中断,TIMx_CNT又从0开始计。
按以下步骤编程:
1.系统初始化,主要初始化时钟等。
2.GPIO初始化,用于LED,有了灯就便于观察了。
3.TIM3的配置。
4.NVIC的配置。
5.编写中断服务函数。
void GPIO_PA_Init()
{//PA8管脚配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_DeInit(GPIOA);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP ;//推挽输出
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO, ENABLE);//使能端口时钟A
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void TIMER3_Init()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_DeInit(TIM3);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseStructure.TIM_Period=10000;//ARR的值
TIM_TimeBaseStructure.TIM_Prescaler=7200-1;
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM3, ENABLE); //开启时钟
}
void NVIC_Configuration()
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);// 抢占式优先级别
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQChannel;//指定中断源
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;// 指定响应优先级别1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
int main(void)
{
Stm32_Clock_Init(9); //系统时钟设置
delay_init(72);//延时初始化
GPIO_PA_Init();
TIMER3_Init();
NVIC_Configuration();
while(1);
}
void TIM3_IRQHandler()
{
if(TIM_GetITStatus(TIM3 , TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM3 , TIM_FLAG_Update);
if(GPIO_ReadOutputDataBit(GPIOA,GPIO_Pin_8)) GPIO_ResetBits(GPIOA, GPIO_Pin_8);
else GPIO_SetBits(GPIOA, GPIO_Pin_8);
}
}