6410中的PWM 定时器
时间:11-10
来源:互联网
点击:
看了OK6410的手册,感觉晕晕的。需要整理一下思路。
我觉得主要的知道下面这几个内容吧。
1.简单介绍:
S3C6410X中有5个定时器,这些定时器产生内部中断。其中,Timer0和Timer1具有PWM功能,而Timer2,3,4没有此功能。
PWM具有两种操作模式:自动装载模式,一次触发模式。为实现PWM功能,芯片提供了16个功能寄存器。这些功能寄存器都连接APB总线。
定时器具有双缓冲特性,这样就能在不停止当前定时器操作的情况下,为下次定时器运行装入新的数值。尽管为定时器设置了新数值,但当前的定时操作能够成功完成。定时器从TCNTBn读取的值是为下次延时定时用的,并不影响当前定时器的运行。当TCNTn减小到0的时候,TCNTBn的值会自动复制到TCNTn中,这就是说的自动装载操作。定时器的当前计数值可以从定时计数观察寄存器中TCNTOn读取。如果TCNTn为0且从装载也为0的话则TCNTn不在进行下次操作。
2.定时器的电路结够图:

4. 定时器的工作原理是什么。
每个定时器有32位的递减计数器。递减计数器的初始值由TCNTBn来加载。当计数器的值变为0时,定时器产生中断信号通知cpu定时器操作完成。当计数器的值变为0时,TCNTBn的值自动加载到递减计数器并开始下个周期的操作。如果定时器停止工作(比如,在定时器工作模式期间清空寄存器TCONn的定时器使能位,这样对应的定时器就会停止工作),这时TCNTBn的值就不会加载到定时器。
而对于PWM功能,要用到寄存器TCMPBn,当递减计数器down-counter的值和比较寄存器TCMPBn的值相同时,定时控制逻辑模块就会改变输出电平。因此比较寄存器TCMPBn决定了PWM的输出。
而且TCNTBn和TCMPBn寄存器具有双缓冲特性,这样就能在不停止当前定时器操作的情况下,为下次定时器运行装入新的数值。尽管为定时器设置了新数值,但当前的定时操作能够成功完成。
5.定时器的工作时序
我说怎么在上面的第一步中突然冒出个TCNTn和TCMPn,我以为是数据手册错了,因为在PWM提供的16个寄存器中没有这两个寄存器。那么请看下面:
从上面内容看出。TCNTn和TCMPn是内部的寄存器(internal registers).而TCNTn寄存器的值可以通过读取寄存器TCNTOn来获得。
6.16个特殊功能寄存器
7.接下来看一下飞凌提供的精确控制LED的程序。
#define rGPMCON (*(volatile unsigned*)(0x7F008820))
#define rGPMDAT (*(volatile unsigned*)(0x7F008824))
#define rGPMPUD (*(volatile unsigned*)(0x7F008828))
#define PCLK 66000000 //forS3C6410 66MHZ
#define HCLK 133000000 //forS3C6410 133MHZ
#define rTCFG0 (*(volatile unsigned*)(0x7F006000))
#define rTCFG1 (*(volatile unsigned*)(0x7F006004))
#define rTCON (*(volatile unsigned*)(0x7F006008))
#define rTCNTB0 (*(volatile unsigned*)(0x7F00600C))
#define rTCMPB0 (*(volatile unsigned*)(0x7F006010))
#define rTCNTO0 (*(volatile unsigned*)(0x7F006014))
#define rTCNTB1 (*(volatile unsigned*)(0x7F006018))
#define rTCMPB1 (*(volatile unsigned*)(0x7F00601c))
#define rTCNTO1 (*(volatile unsigned*)(0x7F006020))
#define rTCNTB2 (*(volatile unsigned*)(0x7F006024))
#define rTCNTO2 (*(volatile unsigned*)(0x7F00602c))
#define rTCNTB3 (*(volatile unsigned*)(0x7F006030))
#define rTCNTO3 (*(volatile unsigned*)(0x7F006038))
#define rTCNTB4 (*(volatile unsigned*)(0x7F00603c))
#define rTCNTO4 (*(volatile unsigned*)(0x7F006040))
#define rTINT_CSTAT (*(volatile unsigned*)(0x7F006044))
void uDelay(int usec)
{
unsigned int val=(PCLK)/1000000-1; //val = 65
//configure prescaler and divider
rTCFG0&=~(0xff<8); //0000_0000_1111_1111 TCFG0[15:8-7:0]
rTCFG0|=0<8; //0000_0000_0000_0000 | 0000_0000_1111_1111 prescalar0 = 255 timer0,timer1 的prescalar value= 255 timer2,3,4的prescalar1 value = 0
rTCFG1&=~(0xf<8); // 0000_1111_1111 TCFG1 [7:0] = 1111_1111 TCFG1[11:8] = 0000(select mux for timer2 . divider value = 1 );
rTCFG1|=0<8;
//compute :
//timer input clock frequency = PCLK /({prescaler value + 1})/{divider value}
// timer2 input clock frequency = 66M /(1)/(1)= 66M hz
//configure timer counter buffer and enable timer2
rTCNTB2=val;
rTCON&=~(0xf<12); // 0000_1111_1111_1111
rTCON|=0xb<12; // 1011_0000_0000_0000 |0000_1111_1111_1111 = 1011_1111_1111_1111
rTCON&=~(2<12); // 1101_1111_1111_1111 &1011_1111_1111_1111 = 1001_1111_1111_1111
//TCON[15]=1 auto-reload
//TCON[14] Reserved bits
//TCON[13]=0 no operatin , =1,update TCNTB2 TCMPB2
//TCON[12]=0 stop , =1 ,start timer2
//rTCON&= 0x9fff; //这样不就可以了吗 ,为什么要花三条语句来写。
while(usec--){
while(rTCNTO2 >= val>>1);
while(rTCNTO2 < val>>1);
};
}
void msDelay(int time)
{
volatile unsigned int i,j;
for(i=0;i<2000000;i++)
for(j=0;j
void GPIO_Init(void)
{
rGPMCON =0x11111;
rGPMPUD =0x00;
rGPMDAT =0X1F;
}
void LedTest(void)
{
volatile unsigned int i ,j;
while(1)
{
for(i=0;i<4;i++)
{
rGPMDAT =~(1
uDelay(1000);
}
}
}
void Main(void)
{
GPIO_Init();
LedTest();
}
备注: 这里只是使用了定时器来精确定时,并没用用定时中断服务。
我觉得主要的知道下面这几个内容吧。
- 定时器的电路结构。
- 定时器的工作原理是什么。定时器如何来使用。{使用的时序是什么,在时间轴上各个寄存器应该如何配置}
- 里面涉及的寄存器都有哪些。各个寄存器的职责是什么。
1.简单介绍:
S3C6410X中有5个定时器,这些定时器产生内部中断。其中,Timer0和Timer1具有PWM功能,而Timer2,3,4没有此功能。
PWM具有两种操作模式:自动装载模式,一次触发模式。为实现PWM功能,芯片提供了16个功能寄存器。这些功能寄存器都连接APB总线。
定时器具有双缓冲特性,这样就能在不停止当前定时器操作的情况下,为下次定时器运行装入新的数值。尽管为定时器设置了新数值,但当前的定时操作能够成功完成。定时器从TCNTBn读取的值是为下次延时定时用的,并不影响当前定时器的运行。当TCNTn减小到0的时候,TCNTBn的值会自动复制到TCNTn中,这就是说的自动装载操作。定时器的当前计数值可以从定时计数观察寄存器中TCNTOn读取。如果TCNTn为0且从装载也为0的话则TCNTn不在进行下次操作。
2.定时器的电路结够图:
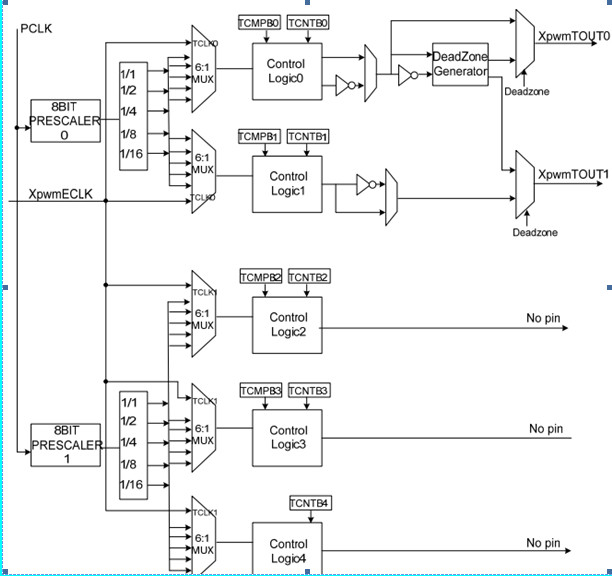
- 定时器架构流程。
- à经过8位的预分频器--à分频器divider[1/1 1/2 1/4 1/8 1/16]-à多路选择器MUX-à逻辑控制器--à(deadzone generator )--à时钟
4. 定时器的工作原理是什么。

每个定时器有32位的递减计数器。递减计数器的初始值由TCNTBn来加载。当计数器的值变为0时,定时器产生中断信号通知cpu定时器操作完成。当计数器的值变为0时,TCNTBn的值自动加载到递减计数器并开始下个周期的操作。如果定时器停止工作(比如,在定时器工作模式期间清空寄存器TCONn的定时器使能位,这样对应的定时器就会停止工作),这时TCNTBn的值就不会加载到定时器。

而对于PWM功能,要用到寄存器TCMPBn,当递减计数器down-counter的值和比较寄存器TCMPBn的值相同时,定时控制逻辑模块就会改变输出电平。因此比较寄存器TCMPBn决定了PWM的输出。
而且TCNTBn和TCMPBn寄存器具有双缓冲特性,这样就能在不停止当前定时器操作的情况下,为下次定时器运行装入新的数值。尽管为定时器设置了新数值,但当前的定时操作能够成功完成。
5.定时器的工作时序
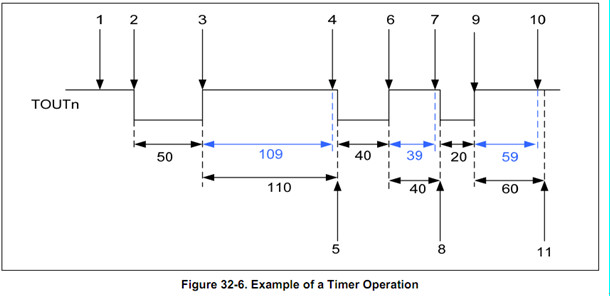
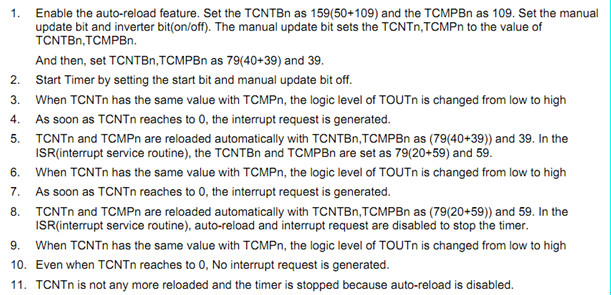
我说怎么在上面的第一步中突然冒出个TCNTn和TCMPn,我以为是数据手册错了,因为在PWM提供的16个寄存器中没有这两个寄存器。那么请看下面:

从上面内容看出。TCNTn和TCMPn是内部的寄存器(internal registers).而TCNTn寄存器的值可以通过读取寄存器TCNTOn来获得。
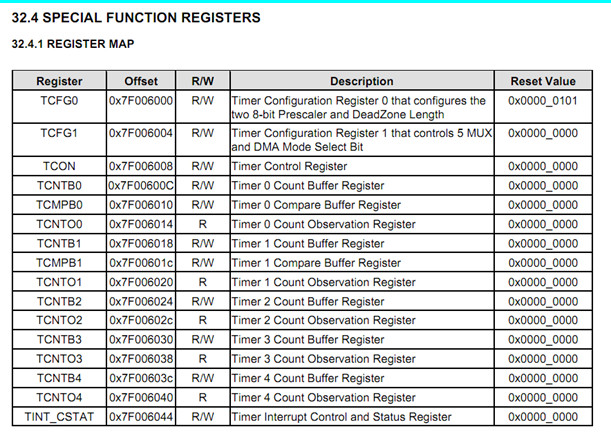
6.16个特殊功能寄存器
7.接下来看一下飞凌提供的精确控制LED的程序。
#define rGPMCON (*(volatile unsigned*)(0x7F008820))
#define rGPMDAT (*(volatile unsigned*)(0x7F008824))
#define rGPMPUD (*(volatile unsigned*)(0x7F008828))
#define PCLK 66000000 //forS3C6410 66MHZ
#define HCLK 133000000 //forS3C6410 133MHZ
#define rTCFG0 (*(volatile unsigned*)(0x7F006000))
#define rTCFG1 (*(volatile unsigned*)(0x7F006004))
#define rTCON (*(volatile unsigned*)(0x7F006008))
#define rTCNTB0 (*(volatile unsigned*)(0x7F00600C))
#define rTCMPB0 (*(volatile unsigned*)(0x7F006010))
#define rTCNTO0 (*(volatile unsigned*)(0x7F006014))
#define rTCNTB1 (*(volatile unsigned*)(0x7F006018))
#define rTCMPB1 (*(volatile unsigned*)(0x7F00601c))
#define rTCNTO1 (*(volatile unsigned*)(0x7F006020))
#define rTCNTB2 (*(volatile unsigned*)(0x7F006024))
#define rTCNTO2 (*(volatile unsigned*)(0x7F00602c))
#define rTCNTB3 (*(volatile unsigned*)(0x7F006030))
#define rTCNTO3 (*(volatile unsigned*)(0x7F006038))
#define rTCNTB4 (*(volatile unsigned*)(0x7F00603c))
#define rTCNTO4 (*(volatile unsigned*)(0x7F006040))
#define rTINT_CSTAT (*(volatile unsigned*)(0x7F006044))
void uDelay(int usec)
{
unsigned int val=(PCLK)/1000000-1; //val = 65
//configure prescaler and divider
rTCFG0&=~(0xff<8); //0000_0000_1111_1111 TCFG0[15:8-7:0]
rTCFG0|=0<8; //0000_0000_0000_0000 | 0000_0000_1111_1111 prescalar0 = 255 timer0,timer1 的prescalar value= 255 timer2,3,4的prescalar1 value = 0
rTCFG1&=~(0xf<8); // 0000_1111_1111 TCFG1 [7:0] = 1111_1111 TCFG1[11:8] = 0000(select mux for timer2 . divider value = 1 );
rTCFG1|=0<8;
//compute :
//timer input clock frequency = PCLK /({prescaler value + 1})/{divider value}
// timer2 input clock frequency = 66M /(1)/(1)= 66M hz
//configure timer counter buffer and enable timer2
rTCNTB2=val;
rTCON&=~(0xf<12); // 0000_1111_1111_1111
rTCON|=0xb<12; // 1011_0000_0000_0000 |0000_1111_1111_1111 = 1011_1111_1111_1111
rTCON&=~(2<12); // 1101_1111_1111_1111 &1011_1111_1111_1111 = 1001_1111_1111_1111
//TCON[15]=1 auto-reload
//TCON[14] Reserved bits
//TCON[13]=0 no operatin , =1,update TCNTB2 TCMPB2
//TCON[12]=0 stop , =1 ,start timer2
//rTCON&= 0x9fff; //这样不就可以了吗 ,为什么要花三条语句来写。
while(usec--){
while(rTCNTO2 >= val>>1);
while(rTCNTO2 < val>>1);
};
}
void msDelay(int time)
{
volatile unsigned int i,j;
for(i=0;i<2000000;i++)
for(j=0;j
void GPIO_Init(void)
{
rGPMCON =0x11111;
rGPMPUD =0x00;
rGPMDAT =0X1F;
}
void LedTest(void)
{
volatile unsigned int i ,j;
while(1)
{
for(i=0;i<4;i++)
{
rGPMDAT =~(1
uDelay(1000);
}
}
}
void Main(void)
{
GPIO_Init();
LedTest();
}
备注: 这里只是使用了定时器来精确定时,并没用用定时中断服务。
6410PWM定时 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)