如何用51单片机接收鼠标的“三轴位移”与按键信息
时间:11-17
来源:互联网
点击:
这里所用的鼠标是PS/2协议的鼠标,测试鼠标为电脑普通光电鼠标(以下简称从机),有一个滚轮,三个按键等。所用编程语言为单片机C语言。用AT89S52作为接收方(以下简称主机),主要负责:接收从机送给主机的信息包并处理、用LCD1602作为显示屏并实时显示位移计数和按键信息,最初无论如何也无法驱动滚轮,经过努力终于完成了这一任务。如下图所示:
我的初衷是将鼠标的数据作为实现2D定位的依据,也就是说,将鼠标当作一智能小车,
通过无线读取鼠标的位移计数来实现定位。可惜所得的计数偏差太大,比如,将鼠标从A点移到B点,再回到A点,此时的计数值并不是当初在A点时的计数值。后来在论坛里发现有人曾经也有过我这种想法,而他所用的是激光鼠标,同样也是计数偏差过大而无法实现定位。
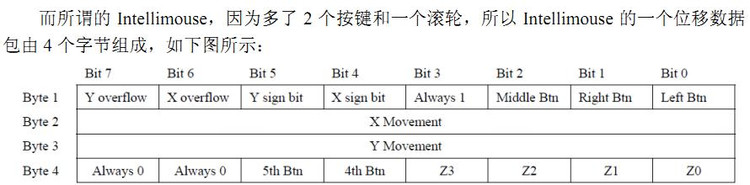
我们先要知道现存的总共有两类鼠标,一类就是所谓的2D(二维)鼠标,它就是我们平常用的那种没有滚轮的鼠标,由于这种鼠标在位移上只有X与Y两个方向,所以称之为2D(二维)鼠标;还有一类就是现在比较常见的3D(三维)鼠标,它们中间存在有一个滚轮,而这个滚轮会产生一个额外的Z位移量,因此,它在位移上有X、Y、Z三个方向,所以又称之为3D(三维)鼠标。下面,我们就来看看这两类鼠标发给主机的数据包有什么不同。下面,我们先来看看二维鼠标。
看到这里,你或许有疑问了,系统是怎么来知道到我到底应当接收3个数据包还是接收4个数据包的呢?三维鼠标的标准是由微软制定的,最初,这种三维的鼠标只工作在标准的PS/2模式下,如果你想让它工作在三维模式下,你需要用0xF3这个设置鼠标采样率的命令,按如下的顺序进行操作:
1.设置鼠标采样率为200
2.设置鼠标采样率为100
3.设置鼠标采样率为80
这之后,如果你的鼠标是个三维鼠标,那么,它将转到三维模式下进行工作,这个时候,主机向它发送0xF2(获得鼠标类型ID)命令,你的工作在三维模式下的鼠标将向主机返回它的类型ID,但如果你的鼠标不支持三维模式,即如果你的鼠标只是一个二维鼠标,它返回给主机的类型ID将是0,这样,主机就能够知道现在你用的鼠标是什么类型的鼠标,并由此知道应当接受3个还是4个数据包了。本实验将只操作标准的二维鼠标,如果你有兴趣,你可以对程序进行改动,以让它支持三维鼠标。
下图是PS2鼠标位移数据包格式:
虽然不能实现定位,但最少我又学多了一种通信协议。以下是程序的所有源代码:
在"main.c"文件中:
#include
#include
#include"LCD1602.h"
#include
#define uchar unsigned char
#define sint signed int
#define uint unsigned int
#include"鼠标测试2.h"
void display()
{
signed int nx=move_x,ny=move_y,nz=move_z;
uchar length=0;
if(move_x<0) {nx=-move_x;xy[2]=-;}
else
xy[2]= ;
for(length=7;length>2;length--)
{
xy[length]=nx%10+48;
nx/=10;
}
if(move_y<0) {ny=-move_y;xy[10]=-;}
else
xy[10]= ;
for(length=15;length>10;length--)
{
xy[length]=ny%10+48;
ny/=10;
}
if(move_z<0){nz=-move_z;lmr[10]=-;}
else
lmr[10]= ;
for(length=15;length>10;length--)
{
lmr[length]=nz%10+48;
nz/=10;
}
write_command(0x80);
write_bytes(xy);
write_command(0x80+0x40);
write_bytes(lmr);
}
uchar fx=0,fy=0,fz=0,a0=0,a1=0,a2=0,a3=0,fl=0,fm=0,fr=0;
//uchar fxf=0,fyf=0;
void deal_data()
{
if(fx) //位5:x符号标志位,为1表示x位移量为负
move_x-=(256-a1);//x坐标减
else
move_x+=a1;//x坐标加
if(fy) //位6:y符号标志位,为1表示y位移量为负
move_y-=(256-a2);//y坐标减
else
move_y+=a2;//y坐标加
if(fz)
move_z-=(16-(a3&0x0f));
else
move_z+=(a3&0x07);
if(fr)//如果点下右键
{lmr[4]=R;return;}
else if(fm)//如果点下中键
{lmr[4]=M;return;}
else if(fl)//如果点下左键
{lmr[4]=L;return;}
else
{lmr[4]=N;return;}
}
void main()
{
SDA=1;CLK=1;
delay(500);//鼠标上电后在500ms左右就会发给主机0xaa和0x00
mouse_to_host();//如果没有接收这两个字节,可能鼠标一次上电后,
mouse_to_host();//不能正常初始化成功或者可以用加长廷时来代替接收
init_lcd();//初始化1602
delay100;//这个廷时相当重要,否则可能在1602中有乱码出现
write_command(0x80);//定位光标在第一行
write_bytes("Initializing....");
write_command(0x80+0x40);//定位光标在第二行
write_bytes(" Please wait! ");
while(init_mouse());//初始化鼠标
deal_recive_data();//处理初始化鼠标时返回给主机的部分数据,用以作调试
write_command(0x80);
write_bytes(deal_1);//显示初始化鼠标时返回给主机的部分数据,用以作调试
write_command(0x80+0x40);
write_bytes(deal_2);//显示初始化鼠标时返回给主机的部分数据,用以作调试
write_command(0x80+0x40);
delay(500);
write_bytes(" Mouse Normal ");
delay(500);
write_command(0x80);
write_bytes("Test PS/2 mouse.");
write_command(0x80+0x40);
write_bytes("Copyright-11-28-");
while(1)
{
host_to_mouse(0xeb);//在remote模式中,主机每发送一个0xeb命令,从机
mouse_to_host();//将应答0xfa,之后就是数据包
a0=mouse_to_host();//第一个数据包
fr=a0&0x02;//右键
fm=a0&0x04;//中键
fl=a0&0x01;//左键
fx=a0&0x10;//x的符号位
fy=a0&0x20;//y的符号位
a1=mouse_to_host();//第二个数据包 x位移量
a2=mouse_to_host();//第三个数据包 y位移量
a3=mouse_to_host();//第四个数据包 z位移量
fz=a3&0x08;//z的符号位
/*fxf=a0&0x40+0x30;
fyf=a0&0x80+0x30;
lmr[6]=fxf;
lmr[7]=fyf;*/
deal_data(); //将x,y,z,fl,fr,fm加入字符串中
display();//加入之后再一次性刷新显示
}
}
/*
第1个数据包
位0:左键按下标志位,为1表示左键被按下。
位1:右键按下标志位,为1表示右键被按下。
位2:中键按下标志位,为1表示中键被按下。
位3:保留位,总是为1。
位4:X符号标志位,为1表示X位移量为负。
位5:Y符号标志位,为1表示Y位移量为负。
位6:X溢出标志位,为1表示X位移量溢出了。
位7:Y溢出标志位,为1表示Y位移量溢出了。
三维鼠标数据包中第一个数据包每位的含义与
二维鼠标数据包中第一个数据包中每位含义完全相同,
唯一不同的就在于它每次会多发送一个数据包,
即第4个数据包,这个数据包包含了Z的位移量,
同X、Y位移量相同的是,它们都是以补码表示的。
不过与X及Y位移量不同的是,Z位移量是4位的,
其中最高位(第四位)是符号位,因此,Z位移量的有效的范围为:-8~7。
而X与Y的位移量是9位的,最高一位(第9位)是符号位,
这个符号位在第一个数据包中表示,
故,X与Y的位移量的有效范围为:-256~255。*/
在"LCD1602.h"文件中:
#define uint unsigned int
#define uchar unsigned char
sbit RS=P2^0; //寄存器选择位,将RS位定义为P2.0引脚
sbit RW=P2^1; //读写选择位,将RW位定义为P2.1引脚
sbit LCDEN=P2^2; //使能信号位,将E位定义为P2.2引脚
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void write_command(char command)//发送命令
{
RS=0;
P0=command;
LCDEN=1;
delay(3);
LCDEN=0;
RS=1;
}
void write_dat(char dat)//发送单个字节
{
RS=1;
P0=dat;
LCDEN=1;
delay(1);
LCDEN=0;
}
void init_lcd()//初始化1602
{
RW=0;
delay(5);
write_command(0x38);//设置工作方式
delay(5);
write_command(0x0f);//设置显示、光标和闪烁开、关
delay(5);
write_command(0x06);//设置光标、画面移动方式
delay(5);
write_command(0x80);//设置光标位置
delay(5);
}
void write_bytes(char *ch)//发送字符串
{
while(*ch)
write_dat(*ch++);
}
在"鼠标测试2.h"文件中:
#include
#define delay10 {_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}//延时10us
#define delay100 {delay10 delay10 delay10 delay10 delay10 delay10 delay10 delay10 delay10 delay10;}
sbit SDA=P3^2; //P3^3 //int0号中断(本程序不用中断接收方式)
sbit CLK=P3^3;
bit pp=0,ACK=0;
uchar recv=0;
signed int move_x=00000;//存放横坐标
signed int move_y=00000;//存放纵坐标
signed int move_z=00000; //总共接收到的字节总数
unsigned char data xy[16]= "x: y: "; //2 10
unsigned char data lmr[16]= "key:N z: "; //5 10
unsigned char idata deal_1[20]=" "; //用来存放初始化鼠标时鼠标返回的信息
unsigned char idata deal_2[20]=" ";
uchar idata ret_ini_dat[18]=0; //间接寻址片内数据存储区,可访问片内全部RAM空间(256bytes)
void host_to_mouse(uchar cmd)
{
uchar i;
CLK=0;
delay100;
delay100;
ACC=cmd;
pp=~P;//获得奇偶校验位
SDA=0;
CLK=1;
for(i=0;i<8;i++)
{
while(CLK!=0);
SDA=cmd&0x01;
cmd>>=1;
while(CLK!=1);
}
while(CLK!=0);
SDA=pp;//发送奇偶校验位
while(CLK!=1);
while(CLK!=0);
SDA=1;
while(CLK!=1);
while(CLK!=0);
ACK=SDA;//接收应答位
while(CLK!=1);
}
uchar mouse_to_host()
{
uchar i,temp=0;
while(CLK!=0);//等待低电平
while(SDA!=0);
while(CLK!=1);//等待高电平
for(i=0;i<8;i++)
{
temp>>=1;
while(CLK!=0);
if(SDA==1)
temp=0x80|temp;
while(CLK!=1);
}
while(CLK!=0);
pp=SDA;//接收奇偶校验位
while(CLK!=1);
while(CLK!=0);
while(CLK!=1);
ACC=temp;
if(~P==pp)//如果检验成功则返回接收到的数据,否则返回0
{
recv=temp;
return temp;
}
return 0;
}
//用0xf0代替相邻的0xc8,0x03可使鼠标进入remote模式,默认为stream模式
uchar code num[15]={0xf3,0xc8,0xf3,0x64, //0xc8 200/sec,0x64 100/sec
0x50,0xc8,0xf2, //0x50 80/sec,0xf2读设备类型
0xf3,0xC8,0xf2,0XF0, //0x0a 10/sec,0xf2读设备类型,0x03滚轮分辨率8count/mm
0xe6,0xf3,0x28,0xf4};//0XE6 设置缩放比率为1:1,0x28 40/sec
//(0xe8,0xxx)设置滚轮分辨率,/0xe8,0x03/
/*
uchar code num[13]={0xf3,0xc8,0xf3,0x64,//
0xf3,0x50,0xf2,0xe8,0x03,,
0xe6,0xf3,0x28,0xf4};//
*///微软支持第4 和第5 键的Intellimouse 的驱动
/*uchar code num[17]={0xf3,0xc8,0xf3,0x64,
0xf3,0x50,0xf2,0xf3,
0xc8,0xf3,0xc8,0xf3,
0xc8,0xf3,0x50,0xf2,0x04};*/
bit init_mouse()
{
uchar i=0;
bit good=1;
for(i=0;i<3;i++)
{
host_to_mouse(0xff); //复位命令,鼠标连续返回三个字节
ret_ini_dat[0]=mouse_to_host();//鼠标返回0xfa
ret_ini_dat[1]=mouse_to_host();//鼠标返回0xaa
ret_ini_dat[2]=mouse_to_host();//鼠标返回0x00
}
for(i=0;i<15;i++)
{
host_to_mouse(num[i]);
ret_ini_dat[i+3]=mouse_to_host();
}
return good=0;
}
void deal_recive_data()//处理初始化鼠标时返回给主机的部分数据,用以作调试
{//处理成十六进制和ASCII码
uchar i=0,j=0,xx=0;
for(i=0;i<10;i++)
{
xx=ret_ini_dat[i];
if(((xx>>4)&0x0f)>=0x00 && ((xx>>4)&0x0f)<=0x09)
deal_1[j++]=((xx>>4)&0x0f)+0x30;
else
deal_1[j++]=((xx>>4)&0x0f)+55;
if((xx&0x0f)>=0x00 && (xx&0x0f)<=0x09)
deal_1[j++]=(xx&0x0f)+0x30;
else
deal_1[j++]=(xx&0x0f)+55;
}
j=0;
for(i=10;i<20;i++)
{
xx=ret_ini_dat[i];
if(((xx>>4)&0x0f)>=0x00 && ((xx>>4)&0x0f)<=0x09)
deal_2[j++]=((xx>>4)&0x0f)+0x30;
else
deal_2[j++]=((xx>>4)&0x0f)+55;
if((xx&0x0f)>=0x00 && (xx&0x0f)<=0x09)
deal_2[j++]=(xx&0x0f)+0x30;
else
deal_2[j++]=(xx&0x0f)+55;
}
}

我的初衷是将鼠标的数据作为实现2D定位的依据,也就是说,将鼠标当作一智能小车,
通过无线读取鼠标的位移计数来实现定位。可惜所得的计数偏差太大,比如,将鼠标从A点移到B点,再回到A点,此时的计数值并不是当初在A点时的计数值。后来在论坛里发现有人曾经也有过我这种想法,而他所用的是激光鼠标,同样也是计数偏差过大而无法实现定位。
我们先要知道现存的总共有两类鼠标,一类就是所谓的2D(二维)鼠标,它就是我们平常用的那种没有滚轮的鼠标,由于这种鼠标在位移上只有X与Y两个方向,所以称之为2D(二维)鼠标;还有一类就是现在比较常见的3D(三维)鼠标,它们中间存在有一个滚轮,而这个滚轮会产生一个额外的Z位移量,因此,它在位移上有X、Y、Z三个方向,所以又称之为3D(三维)鼠标。下面,我们就来看看这两类鼠标发给主机的数据包有什么不同。下面,我们先来看看二维鼠标。
| 第1个数据包 |
| 位0:左键按下标志位,为1表示左键被按下。 位1:右键按下标志位,为1表示右键被按下。 位2:中键按下标志位,为1表示中键被按下。 位3:保留位,总是为1。 位4:X符号标志位,为1表示X位移量为负。 位5:Y符号标志位,为1表示Y位移量为负。 位6:X溢出标志位,为1表示X位移量溢出了。 位7:Y溢出标志位,为1表示Y位移量溢出了。 |
| 第2个数据包X位移量 | |
|
第4个数据包Z位移量
看到这里,你或许有疑问了,系统是怎么来知道到我到底应当接收3个数据包还是接收4个数据包的呢?三维鼠标的标准是由微软制定的,最初,这种三维的鼠标只工作在标准的PS/2模式下,如果你想让它工作在三维模式下,你需要用0xF3这个设置鼠标采样率的命令,按如下的顺序进行操作:
1.设置鼠标采样率为200
2.设置鼠标采样率为100
3.设置鼠标采样率为80
这之后,如果你的鼠标是个三维鼠标,那么,它将转到三维模式下进行工作,这个时候,主机向它发送0xF2(获得鼠标类型ID)命令,你的工作在三维模式下的鼠标将向主机返回它的类型ID,但如果你的鼠标不支持三维模式,即如果你的鼠标只是一个二维鼠标,它返回给主机的类型ID将是0,这样,主机就能够知道现在你用的鼠标是什么类型的鼠标,并由此知道应当接受3个还是4个数据包了。本实验将只操作标准的二维鼠标,如果你有兴趣,你可以对程序进行改动,以让它支持三维鼠标。
下图是PS2鼠标位移数据包格式:
虽然不能实现定位,但最少我又学多了一种通信协议。以下是程序的所有源代码:
在"main.c"文件中:
#include
#include
#include"LCD1602.h"
#include
#define uchar unsigned char
#define sint signed int
#define uint unsigned int
#include"鼠标测试2.h"
void display()
{
signed int nx=move_x,ny=move_y,nz=move_z;
uchar length=0;
if(move_x<0) {nx=-move_x;xy[2]=-;}
else
xy[2]= ;
for(length=7;length>2;length--)
{
xy[length]=nx%10+48;
nx/=10;
}
if(move_y<0) {ny=-move_y;xy[10]=-;}
else
xy[10]= ;
for(length=15;length>10;length--)
{
xy[length]=ny%10+48;
ny/=10;
}
if(move_z<0){nz=-move_z;lmr[10]=-;}
else
lmr[10]= ;
for(length=15;length>10;length--)
{
lmr[length]=nz%10+48;
nz/=10;
}
write_command(0x80);
write_bytes(xy);
write_command(0x80+0x40);
write_bytes(lmr);
}
uchar fx=0,fy=0,fz=0,a0=0,a1=0,a2=0,a3=0,fl=0,fm=0,fr=0;
//uchar fxf=0,fyf=0;
void deal_data()
{
if(fx) //位5:x符号标志位,为1表示x位移量为负
move_x-=(256-a1);//x坐标减
else
move_x+=a1;//x坐标加
if(fy) //位6:y符号标志位,为1表示y位移量为负
move_y-=(256-a2);//y坐标减
else
move_y+=a2;//y坐标加
if(fz)
move_z-=(16-(a3&0x0f));
else
move_z+=(a3&0x07);
if(fr)//如果点下右键
{lmr[4]=R;return;}
else if(fm)//如果点下中键
{lmr[4]=M;return;}
else if(fl)//如果点下左键
{lmr[4]=L;return;}
else
{lmr[4]=N;return;}
}
void main()
{
SDA=1;CLK=1;
delay(500);//鼠标上电后在500ms左右就会发给主机0xaa和0x00
mouse_to_host();//如果没有接收这两个字节,可能鼠标一次上电后,
mouse_to_host();//不能正常初始化成功或者可以用加长廷时来代替接收
init_lcd();//初始化1602
delay100;//这个廷时相当重要,否则可能在1602中有乱码出现
write_command(0x80);//定位光标在第一行
write_bytes("Initializing....");
write_command(0x80+0x40);//定位光标在第二行
write_bytes(" Please wait! ");
while(init_mouse());//初始化鼠标
deal_recive_data();//处理初始化鼠标时返回给主机的部分数据,用以作调试
write_command(0x80);
write_bytes(deal_1);//显示初始化鼠标时返回给主机的部分数据,用以作调试
write_command(0x80+0x40);
write_bytes(deal_2);//显示初始化鼠标时返回给主机的部分数据,用以作调试
write_command(0x80+0x40);
delay(500);
write_bytes(" Mouse Normal ");
delay(500);
write_command(0x80);
write_bytes("Test PS/2 mouse.");
write_command(0x80+0x40);
write_bytes("Copyright-11-28-");
while(1)
{
host_to_mouse(0xeb);//在remote模式中,主机每发送一个0xeb命令,从机
mouse_to_host();//将应答0xfa,之后就是数据包
a0=mouse_to_host();//第一个数据包
fr=a0&0x02;//右键
fm=a0&0x04;//中键
fl=a0&0x01;//左键
fx=a0&0x10;//x的符号位
fy=a0&0x20;//y的符号位
a1=mouse_to_host();//第二个数据包 x位移量
a2=mouse_to_host();//第三个数据包 y位移量
a3=mouse_to_host();//第四个数据包 z位移量
fz=a3&0x08;//z的符号位
/*fxf=a0&0x40+0x30;
fyf=a0&0x80+0x30;
lmr[6]=fxf;
lmr[7]=fyf;*/
deal_data(); //将x,y,z,fl,fr,fm加入字符串中
display();//加入之后再一次性刷新显示
}
}
/*
第1个数据包
位0:左键按下标志位,为1表示左键被按下。
位1:右键按下标志位,为1表示右键被按下。
位2:中键按下标志位,为1表示中键被按下。
位3:保留位,总是为1。
位4:X符号标志位,为1表示X位移量为负。
位5:Y符号标志位,为1表示Y位移量为负。
位6:X溢出标志位,为1表示X位移量溢出了。
位7:Y溢出标志位,为1表示Y位移量溢出了。
三维鼠标数据包中第一个数据包每位的含义与
二维鼠标数据包中第一个数据包中每位含义完全相同,
唯一不同的就在于它每次会多发送一个数据包,
即第4个数据包,这个数据包包含了Z的位移量,
同X、Y位移量相同的是,它们都是以补码表示的。
不过与X及Y位移量不同的是,Z位移量是4位的,
其中最高位(第四位)是符号位,因此,Z位移量的有效的范围为:-8~7。
而X与Y的位移量是9位的,最高一位(第9位)是符号位,
这个符号位在第一个数据包中表示,
故,X与Y的位移量的有效范围为:-256~255。*/
在"LCD1602.h"文件中:
#define uint unsigned int
#define uchar unsigned char
sbit RS=P2^0; //寄存器选择位,将RS位定义为P2.0引脚
sbit RW=P2^1; //读写选择位,将RW位定义为P2.1引脚
sbit LCDEN=P2^2; //使能信号位,将E位定义为P2.2引脚
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void write_command(char command)//发送命令
{
RS=0;
P0=command;
LCDEN=1;
delay(3);
LCDEN=0;
RS=1;
}
void write_dat(char dat)//发送单个字节
{
RS=1;
P0=dat;
LCDEN=1;
delay(1);
LCDEN=0;
}
void init_lcd()//初始化1602
{
RW=0;
delay(5);
write_command(0x38);//设置工作方式
delay(5);
write_command(0x0f);//设置显示、光标和闪烁开、关
delay(5);
write_command(0x06);//设置光标、画面移动方式
delay(5);
write_command(0x80);//设置光标位置
delay(5);
}
void write_bytes(char *ch)//发送字符串
{
while(*ch)
write_dat(*ch++);
}
在"鼠标测试2.h"文件中:
#include
#define delay10 {_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}//延时10us
#define delay100 {delay10 delay10 delay10 delay10 delay10 delay10 delay10 delay10 delay10 delay10;}
sbit SDA=P3^2; //P3^3 //int0号中断(本程序不用中断接收方式)
sbit CLK=P3^3;
bit pp=0,ACK=0;
uchar recv=0;
signed int move_x=00000;//存放横坐标
signed int move_y=00000;//存放纵坐标
signed int move_z=00000; //总共接收到的字节总数
unsigned char data xy[16]= "x: y: "; //2 10
unsigned char data lmr[16]= "key:N z: "; //5 10
unsigned char idata deal_1[20]=" "; //用来存放初始化鼠标时鼠标返回的信息
unsigned char idata deal_2[20]=" ";
uchar idata ret_ini_dat[18]=0; //间接寻址片内数据存储区,可访问片内全部RAM空间(256bytes)
void host_to_mouse(uchar cmd)
{
uchar i;
CLK=0;
delay100;
delay100;
ACC=cmd;
pp=~P;//获得奇偶校验位
SDA=0;
CLK=1;
for(i=0;i<8;i++)
{
while(CLK!=0);
SDA=cmd&0x01;
cmd>>=1;
while(CLK!=1);
}
while(CLK!=0);
SDA=pp;//发送奇偶校验位
while(CLK!=1);
while(CLK!=0);
SDA=1;
while(CLK!=1);
while(CLK!=0);
ACK=SDA;//接收应答位
while(CLK!=1);
}
uchar mouse_to_host()
{
uchar i,temp=0;
while(CLK!=0);//等待低电平
while(SDA!=0);
while(CLK!=1);//等待高电平
for(i=0;i<8;i++)
{
temp>>=1;
while(CLK!=0);
if(SDA==1)
temp=0x80|temp;
while(CLK!=1);
}
while(CLK!=0);
pp=SDA;//接收奇偶校验位
while(CLK!=1);
while(CLK!=0);
while(CLK!=1);
ACC=temp;
if(~P==pp)//如果检验成功则返回接收到的数据,否则返回0
{
recv=temp;
return temp;
}
return 0;
}
//用0xf0代替相邻的0xc8,0x03可使鼠标进入remote模式,默认为stream模式
uchar code num[15]={0xf3,0xc8,0xf3,0x64, //0xc8 200/sec,0x64 100/sec
0x50,0xc8,0xf2, //0x50 80/sec,0xf2读设备类型
0xf3,0xC8,0xf2,0XF0, //0x0a 10/sec,0xf2读设备类型,0x03滚轮分辨率8count/mm
0xe6,0xf3,0x28,0xf4};//0XE6 设置缩放比率为1:1,0x28 40/sec
//(0xe8,0xxx)设置滚轮分辨率,/0xe8,0x03/
/*
uchar code num[13]={0xf3,0xc8,0xf3,0x64,//
0xf3,0x50,0xf2,0xe8,0x03,,
0xe6,0xf3,0x28,0xf4};//
*///微软支持第4 和第5 键的Intellimouse 的驱动
/*uchar code num[17]={0xf3,0xc8,0xf3,0x64,
0xf3,0x50,0xf2,0xf3,
0xc8,0xf3,0xc8,0xf3,
0xc8,0xf3,0x50,0xf2,0x04};*/
bit init_mouse()
{
uchar i=0;
bit good=1;
for(i=0;i<3;i++)
{
host_to_mouse(0xff); //复位命令,鼠标连续返回三个字节
ret_ini_dat[0]=mouse_to_host();//鼠标返回0xfa
ret_ini_dat[1]=mouse_to_host();//鼠标返回0xaa
ret_ini_dat[2]=mouse_to_host();//鼠标返回0x00
}
for(i=0;i<15;i++)
{
host_to_mouse(num[i]);
ret_ini_dat[i+3]=mouse_to_host();
}
return good=0;
}
void deal_recive_data()//处理初始化鼠标时返回给主机的部分数据,用以作调试
{//处理成十六进制和ASCII码
uchar i=0,j=0,xx=0;
for(i=0;i<10;i++)
{
xx=ret_ini_dat[i];
if(((xx>>4)&0x0f)>=0x00 && ((xx>>4)&0x0f)<=0x09)
deal_1[j++]=((xx>>4)&0x0f)+0x30;
else
deal_1[j++]=((xx>>4)&0x0f)+55;
if((xx&0x0f)>=0x00 && (xx&0x0f)<=0x09)
deal_1[j++]=(xx&0x0f)+0x30;
else
deal_1[j++]=(xx&0x0f)+55;
}
j=0;
for(i=10;i<20;i++)
{
xx=ret_ini_dat[i];
if(((xx>>4)&0x0f)>=0x00 && ((xx>>4)&0x0f)<=0x09)
deal_2[j++]=((xx>>4)&0x0f)+0x30;
else
deal_2[j++]=((xx>>4)&0x0f)+55;
if((xx&0x0f)>=0x00 && (xx&0x0f)<=0x09)
deal_2[j++]=(xx&0x0f)+0x30;
else
deal_2[j++]=(xx&0x0f)+55;
}
}
51单片机三轴位移按键信 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)