15. 定时计数器T0作定时应用技术(一)
时间:11-18
来源:互联网
点击:
1.实验任务
用AT89S51单片机的定时/计数器T0产生一秒的定时时间,作为秒计数时间,当一秒产生时,秒计数加1,秒计数到60时,自动从0开始。硬件电路如下图所示
2.电路原理图
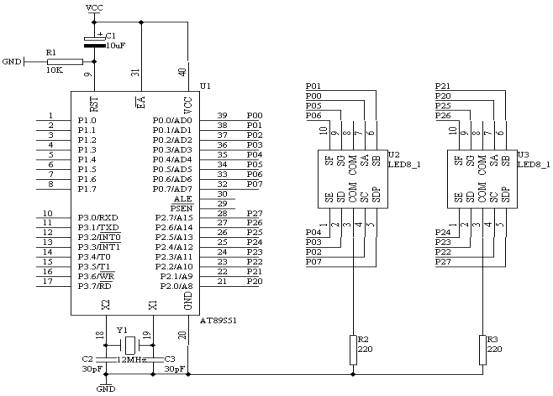
图4.15.1 3.系统板上硬件连线
(1.把“单片机系统”区域中的P0.0/AD0-P0.7/AD7端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P0.0/AD0对应着a,P0.1/AD1对应着b,……,P0.7/AD7对应着h。
(2.把“单片机系统”区域中的P2.0/A8-P2.7/A15端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P2.0/A8对应着a,P2.1/A9对应着b,……,P2.7/A15对应着h。
4.程序设计内容
AT89S51单片机的内部16位定时/计数器是一个可编程定时/计数器,它既可以工作在13位定时方式,也可以工作在16位定时方式和8位定时方式。只要通过设置特殊功能寄存器TMOD,即可完成。定时/计数器何时工作也是通过软件来设定TCON特殊功能寄存器来完成的。
现在我们选择16位定时工作方式,对于T0来说,最大定时也只有65536us,即65.536ms,无法达到我们所需要的1秒的定时,因此,我们必须通过软件来处理这个问题,假设我们取T0的最大定时为50ms,即要定时1秒需要经过20次的50ms的定时。对于这20次我们就可以采用软件的方法来统计了。
因此,我们设定TMOD=00000001B,即TMOD=01H
下面我们要给T0定时/计数器的TH0,TL0装入预置初值,通过下面的公式可以计算出
TH0=(216-50000)/256
TL0=(216-50000)MOD256
当T0在工作的时候,我们如何得知50ms的定时时间已到,这回我们通过检测TCON特殊功能寄存器中的TF0标志位,如果TF0=1表示定时时间已到。
5.程序框图

图4.15.2 6.汇编源程序(查询法)
SECONDEQU30H
TCOUNTEQU31H
ORG00H
START:MOVSECOND,#00H
MOVTCOUNT,#00H
MOVTMOD,#01H
MOVTH0,#(65536-50000)/256
MOVTL0,#(65536-50000)MOD256
SETBTR0
DISP:MOVA,SECOND
MOVB,#10
divAB
MOVDPTR,#TABLE
MOVCA,@A+DPTR
MOVP0,A
MOVA,B
MOVCA,@A+DPTR
MOVP2,A
WAIT:JNBTF0,WAIT
CLRTF0
MOVTH0,#(65536-50000)/256
MOVTL0,#(65536-50000)MOD256
INCTCOUNT
MOVA,TCOUNT
CJNEA,#20,NEXT
MOVTCOUNT,#00H
INCSECOND
MOVA,SECOND
CJNEA,#60,NEX
MOVSECOND,#00H
NEX:LJMPDISP
NEXT:LJMPWAIT
TABLE:DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
7.C语言源程序(查询法)
#include
unsignedcharcodedispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsignedcharsecond;
unsignedchartcount;
voidmain(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1)
{
if(TF0==1)
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TF0=0;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
}
}
1.汇编源程序(中断法)
SECONDEQU30H
TCOUNTEQU31H
ORG00H
LJMPSTART
ORG0BH
LJMPINT0X
START:MOVSECOND,#00H
MOVA,SECOND
MOVB,#10
divAB
MOVDPTR,#TABLE
MOVCA,@A+DPTR
MOVP0,A
MOVA,B
MOVCA,@A+DPTR
MOVP2,A
MOVTCOUNT,#00H
MOVTMOD,#01H
MOVTH0,#(65536-50000)/256
MOVTL0,#(65536-50000)MOD256
SETBTR0
SETBET0
SETBEA
SJMP$
INT0X:
MOVTH0,#(65536-50000)/256
MOVTL0,#(65536-50000)MOD256
INCTCOUNT
MOVA,TCOUNT
CJNEA,#20,NEXT
MOVTCOUNT,#00H
INCSECOND
MOVA,SECOND
CJNEA,#60,NEX
MOVSECOND,#00H
NEX:MOVA,SECOND
MOVB,#10
divAB
MOVDPTR,#TABLE
MOVCA,@A+DPTR
MOVP0,A
MOVA,B
MOVCA,@A+DPTR
MOVP2,A
NEXT:RETI
TABLE:DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
2.C语言源程序(中断法)
#include
unsignedcharcodedispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsignedcharsecond;
unsignedchartcount;
voidmain(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
ET0=1;
EA=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1);
}
voidt0(void)interrupt1using0
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
用AT89S51单片机的定时/计数器T0产生一秒的定时时间,作为秒计数时间,当一秒产生时,秒计数加1,秒计数到60时,自动从0开始。硬件电路如下图所示
2.电路原理图
(1.把“单片机系统”区域中的P0.0/AD0-P0.7/AD7端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P0.0/AD0对应着a,P0.1/AD1对应着b,……,P0.7/AD7对应着h。
(2.把“单片机系统”区域中的P2.0/A8-P2.7/A15端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P2.0/A8对应着a,P2.1/A9对应着b,……,P2.7/A15对应着h。
4.程序设计内容
AT89S51单片机的内部16位定时/计数器是一个可编程定时/计数器,它既可以工作在13位定时方式,也可以工作在16位定时方式和8位定时方式。只要通过设置特殊功能寄存器TMOD,即可完成。定时/计数器何时工作也是通过软件来设定TCON特殊功能寄存器来完成的。
现在我们选择16位定时工作方式,对于T0来说,最大定时也只有65536us,即65.536ms,无法达到我们所需要的1秒的定时,因此,我们必须通过软件来处理这个问题,假设我们取T0的最大定时为50ms,即要定时1秒需要经过20次的50ms的定时。对于这20次我们就可以采用软件的方法来统计了。
因此,我们设定TMOD=00000001B,即TMOD=01H
下面我们要给T0定时/计数器的TH0,TL0装入预置初值,通过下面的公式可以计算出
TH0=(216-50000)/256
TL0=(216-50000)MOD256
当T0在工作的时候,我们如何得知50ms的定时时间已到,这回我们通过检测TCON特殊功能寄存器中的TF0标志位,如果TF0=1表示定时时间已到。
5.程序框图
SECONDEQU30H
TCOUNTEQU31H
ORG00H
START:MOVSECOND,#00H
MOVTCOUNT,#00H
MOVTMOD,#01H
MOVTH0,#(65536-50000)/256
MOVTL0,#(65536-50000)MOD256
SETBTR0
DISP:MOVA,SECOND
MOVB,#10
divAB
MOVDPTR,#TABLE
MOVCA,@A+DPTR
MOVP0,A
MOVA,B
MOVCA,@A+DPTR
MOVP2,A
WAIT:JNBTF0,WAIT
CLRTF0
MOVTH0,#(65536-50000)/256
MOVTL0,#(65536-50000)MOD256
INCTCOUNT
MOVA,TCOUNT
CJNEA,#20,NEXT
MOVTCOUNT,#00H
INCSECOND
MOVA,SECOND
CJNEA,#60,NEX
MOVSECOND,#00H
NEX:LJMPDISP
NEXT:LJMPWAIT
TABLE:DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
7.C语言源程序(查询法)
#include
unsignedcharcodedispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsignedcharsecond;
unsignedchartcount;
voidmain(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1)
{
if(TF0==1)
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TF0=0;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
}
}
1.汇编源程序(中断法)
SECONDEQU30H
TCOUNTEQU31H
ORG00H
LJMPSTART
ORG0BH
LJMPINT0X
START:MOVSECOND,#00H
MOVA,SECOND
MOVB,#10
divAB
MOVDPTR,#TABLE
MOVCA,@A+DPTR
MOVP0,A
MOVA,B
MOVCA,@A+DPTR
MOVP2,A
MOVTCOUNT,#00H
MOVTMOD,#01H
MOVTH0,#(65536-50000)/256
MOVTL0,#(65536-50000)MOD256
SETBTR0
SETBET0
SETBEA
SJMP$
INT0X:
MOVTH0,#(65536-50000)/256
MOVTL0,#(65536-50000)MOD256
INCTCOUNT
MOVA,TCOUNT
CJNEA,#20,NEXT
MOVTCOUNT,#00H
INCSECOND
MOVA,SECOND
CJNEA,#60,NEX
MOVSECOND,#00H
NEX:MOVA,SECOND
MOVB,#10
divAB
MOVDPTR,#TABLE
MOVCA,@A+DPTR
MOVP0,A
MOVA,B
MOVCA,@A+DPTR
MOVP2,A
NEXT:RETI
TABLE:DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
2.C语言源程序(中断法)
#include
unsignedcharcodedispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsignedcharsecond;
unsignedchartcount;
voidmain(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
ET0=1;
EA=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1);
}
voidt0(void)interrupt1using0
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
定时计数器T0 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)