32. 电子密码锁设计
时间:11-18
来源:互联网
点击:
1.实验任务
根据设定好的密码,采用二个按键实现密码的输入功能,当密码输入正确之后,锁就打开,如果输入的三次的密码不正确,就锁定按键3秒钟,同时发现报警声,直到没有按键按下3种后,才打开按键锁定功能;否则在3秒钟内仍有按键按下,就重新锁定按键3秒时间并报警。
2.电路原理图
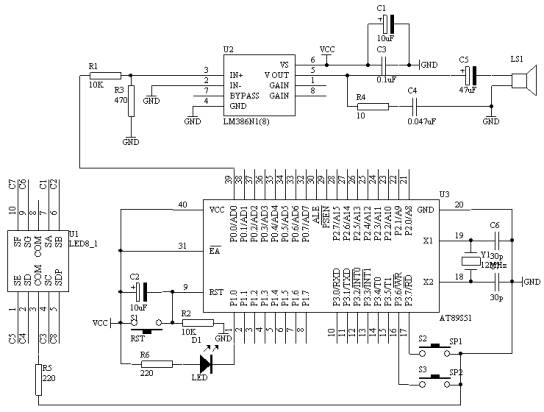
图4.32.1 3.系统板上硬件连线
(1).把“单片机系统”区域中的P0.0/AD0用导线连接到“音频放大模块”区域中的SPKIN端子上;
(2).把“音频放大模块”区域中的SPKOUT端子接喇叭和;
(3).把“单片机系统”区域中的P2.0/A8-P2.7/A15用8芯排线连接到“四路静态数码显示”区域中的任一个ABCDEFGH端子上;
(4).把“单片机系统“区域中的P1.0用导线连接到“八路发光二极管模块”区域中的L1端子上;
(5).把“单片机系统”区域中的P3.6/WR、P3.7/RD用导线连接到“独立式键盘”区域中的SP1和SP2端子上;
4.程序设计内容
(1).密码的设定,在此程序中密码是固定在程序存储器ROM中,假设预设的密码为“12345”共5位密码。
(2).密码的输入问题:
由于采用两个按键来完成密码的输入,那么其中一个按键为功能键,另一个按键为数字键。在输入过程中,首先输入密码的长度,接着根据密码的长度输入密码的位数,直到所有长度的密码都已经输入完毕;或者输入确认功能键之后,才能完成密码的输入过程。进入密码的判断比较处理状态并给出相应的处理过程。
(3).按键禁止功能:初始化时,是允许按键输入密码,当有按键按下并开始进入按键识别状态时,按键禁止功能被激活,但启动的状态在3次密码输入不正确的情况下发生的。
5.C语言源程序
#include
unsignedcharcodeps[]={1,2,3,4,5};
unsignedcharcodedispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x40};
unsignedcharpslen=9;
unsignedchartemplen;
unsignedchardigit;
unsignedcharfuncount;
unsignedchardigitcount;
unsignedcharpsbuf[9];
bitcmpflag;
bithibitflag;
biterrorflag;
bitrightflag;
unsignedintsecond3;
unsignedintaa;
unsignedintbb;
bitalarmflag;
bitexchangeflag;
unsignedintcc;
unsignedintdd;
bitokflag;
unsignedcharoka;
unsignedcharokb;
voidmain(void)
{
unsignedchari,j;
P2=dispcode[digitcount];
TMOD=0x01;
TH0=(65536-500)/256;
TL0=(65536-500)%256;
TR0=1;
ET0=1;
EA=1;
while(1)
{
if(cmpflag==0)
{
if(P3_6==0)//functionkey
{
for(i=10;i>0;i--)
for(j=248;j>0;j--);
if(P3_6==0)
{
if(hibitflag==0)
{
funcount++;
if(funcount==pslen+2)
{
funcount=0;
cmpflag=1;
}
P1=dispcode[funcount];
}
else
{
second3=0;
}
while(P3_6==0);
}
}
if(P3_7==0)//digitkey
{
for(i=10;i>0;i--)
for(j=248;j>0;j--);
if(P3_7==0)
{
if(hibitflag==0)
{
digitcount++;
if(digitcount==10)
{
digitcount=0;
}
P2=dispcode[digitcount];
if(funcount==1)
{
pslen=digitcount;
templen=pslen;
}
elseif(funcount>1)
{
psbuf[funcount-2]=digitcount;
}
}
else
{
second3=0;
}
while(P3_7==0);
}
}
}
else
{
cmpflag=0;
for(i=0;i
if(ps
{
hibitflag=1;
i=pslen;
errorflag=1;
rightflag=0;
cmpflag=0;
second3=0;
gotoa;
}
}
cc=0;
errorflag=0;
rightflag=1;
hibitflag=0;
a:cmpflag=0;
}
}
}
voidt0(void)interrupt1using0
{
TH0=(65536-500)/256;
TL0=(65536-500)%256;
if((errorflag==1)&&(rightflag==0))
{
bb++;
if(bb==800)
{
bb=0;
alarmflag=~alarmflag;
}
if(alarmflag==1)
{
P0_0=~P0_0;
}
aa++;
if(aa==800)
{
aa=0;
P0_1=~P0_1;
}
second3++;
if(second3==6400)
{
second3=0;
hibitflag=0;
errorflag=0;
rightflag=0;
cmpflag=0;
P0_1=1;
alarmflag=0;
bb=0;
aa=0;
}
}
if((errorflag==0)&&(rightflag==1))
{
P0_1=0;
cc++;
if(cc<1000)
{
okflag=1;
}
elseif(cc<2000)
{
okflag=0;
}
else
{
errorflag=0;
rightflag=0;
hibitflag=0;
cmpflag=0;
P0_1=1;
cc=0;
oka=0;
okb=0;
okflag=0;
P0_0=1;
}
if(okflag==1)
{
oka++;
if(oka==2)
{
oka=0;
P0_0=~P0_0;
}
}
else
{
okb++;
if(okb==3)
{
okb=0;
P0_0=~P0_0;
}
}
}
}
根据设定好的密码,采用二个按键实现密码的输入功能,当密码输入正确之后,锁就打开,如果输入的三次的密码不正确,就锁定按键3秒钟,同时发现报警声,直到没有按键按下3种后,才打开按键锁定功能;否则在3秒钟内仍有按键按下,就重新锁定按键3秒时间并报警。
2.电路原理图
(1).把“单片机系统”区域中的P0.0/AD0用导线连接到“音频放大模块”区域中的SPKIN端子上;
(2).把“音频放大模块”区域中的SPKOUT端子接喇叭和;
(3).把“单片机系统”区域中的P2.0/A8-P2.7/A15用8芯排线连接到“四路静态数码显示”区域中的任一个ABCDEFGH端子上;
(4).把“单片机系统“区域中的P1.0用导线连接到“八路发光二极管模块”区域中的L1端子上;
(5).把“单片机系统”区域中的P3.6/WR、P3.7/RD用导线连接到“独立式键盘”区域中的SP1和SP2端子上;
4.程序设计内容
(1).密码的设定,在此程序中密码是固定在程序存储器ROM中,假设预设的密码为“12345”共5位密码。
(2).密码的输入问题:
由于采用两个按键来完成密码的输入,那么其中一个按键为功能键,另一个按键为数字键。在输入过程中,首先输入密码的长度,接着根据密码的长度输入密码的位数,直到所有长度的密码都已经输入完毕;或者输入确认功能键之后,才能完成密码的输入过程。进入密码的判断比较处理状态并给出相应的处理过程。
(3).按键禁止功能:初始化时,是允许按键输入密码,当有按键按下并开始进入按键识别状态时,按键禁止功能被激活,但启动的状态在3次密码输入不正确的情况下发生的。
5.C语言源程序
#include
unsignedcharcodeps[]={1,2,3,4,5};
unsignedcharcodedispcode[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f,0x00,0x40};
unsignedcharpslen=9;
unsignedchartemplen;
unsignedchardigit;
unsignedcharfuncount;
unsignedchardigitcount;
unsignedcharpsbuf[9];
bitcmpflag;
bithibitflag;
biterrorflag;
bitrightflag;
unsignedintsecond3;
unsignedintaa;
unsignedintbb;
bitalarmflag;
bitexchangeflag;
unsignedintcc;
unsignedintdd;
bitokflag;
unsignedcharoka;
unsignedcharokb;
voidmain(void)
{
unsignedchari,j;
P2=dispcode[digitcount];
TMOD=0x01;
TH0=(65536-500)/256;
TL0=(65536-500)%256;
TR0=1;
ET0=1;
EA=1;
while(1)
{
if(cmpflag==0)
{
if(P3_6==0)//functionkey
{
for(i=10;i>0;i--)
for(j=248;j>0;j--);
if(P3_6==0)
{
if(hibitflag==0)
{
funcount++;
if(funcount==pslen+2)
{
funcount=0;
cmpflag=1;
}
P1=dispcode[funcount];
}
else
{
second3=0;
}
while(P3_6==0);
}
}
if(P3_7==0)//digitkey
{
for(i=10;i>0;i--)
for(j=248;j>0;j--);
if(P3_7==0)
{
if(hibitflag==0)
{
digitcount++;
if(digitcount==10)
{
digitcount=0;
}
P2=dispcode[digitcount];
if(funcount==1)
{
pslen=digitcount;
templen=pslen;
}
elseif(funcount>1)
{
psbuf[funcount-2]=digitcount;
}
}
else
{
second3=0;
}
while(P3_7==0);
}
}
}
else
{
cmpflag=0;
for(i=0;i
if(ps
{
hibitflag=1;
i=pslen;
errorflag=1;
rightflag=0;
cmpflag=0;
second3=0;
gotoa;
}
}
cc=0;
errorflag=0;
rightflag=1;
hibitflag=0;
a:cmpflag=0;
}
}
}
voidt0(void)interrupt1using0
{
TH0=(65536-500)/256;
TL0=(65536-500)%256;
if((errorflag==1)&&(rightflag==0))
{
bb++;
if(bb==800)
{
bb=0;
alarmflag=~alarmflag;
}
if(alarmflag==1)
{
P0_0=~P0_0;
}
aa++;
if(aa==800)
{
aa=0;
P0_1=~P0_1;
}
second3++;
if(second3==6400)
{
second3=0;
hibitflag=0;
errorflag=0;
rightflag=0;
cmpflag=0;
P0_1=1;
alarmflag=0;
bb=0;
aa=0;
}
}
if((errorflag==0)&&(rightflag==1))
{
P0_1=0;
cc++;
if(cc<1000)
{
okflag=1;
}
elseif(cc<2000)
{
okflag=0;
}
else
{
errorflag=0;
rightflag=0;
hibitflag=0;
cmpflag=0;
P0_1=1;
cc=0;
oka=0;
okb=0;
okflag=0;
P0_0=1;
}
if(okflag==1)
{
oka++;
if(oka==2)
{
oka=0;
P0_0=~P0_0;
}
}
else
{
okb++;
if(okb==3)
{
okb=0;
P0_0=~P0_0;
}
}
}
}
电子密码锁单片机系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)