基于51系列单片机控制步进电机调速闭环系统设计
时间:11-19
来源:互联网
点击:
一、步进电机
1.1
步进电机是将电脉冲信号转变为角位移或线位移的执行机构。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
1.2
本实验所用的步进电机为感应子式步进电机(型号为42BYG016)。感应子式步进电机与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。
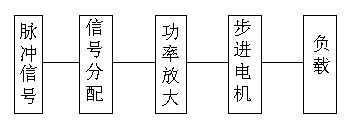
1)脉冲信号的产生
2)信号分配
感应子式不仅以二、四相电机为主,二相电机工作方式有二相四拍和二相八拍两种,
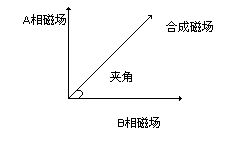
4)功率放大细分驱动器
在步进电机步距角不能满足使用的条件下,可采用细分驱动器来驱动步进电机,细分驱动器的原理是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机运转的。
二、驱动器
由于单片机的I/O不具有直接驱动步进电机的能力,故在本系统中需要步进电机驱动器,我们选择驱动器为KD-221,该驱动器具有输入电压范围广,控制信号输入方式多样等特点。其具体接法如下:
2.1、电源接线:
三、光电开关
1.
2.
3.
4.
5.
1.1
步进电机是将电脉冲信号转变为角位移或线位移的执行机构。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
1.2
本实验所用的步进电机为感应子式步进电机(型号为42BYG016)。感应子式步进电机与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。
1)脉冲信号的产生
2)信号分配
感应子式不仅以二、四相电机为主,二相电机工作方式有二相四拍和二相八拍两种,
4)功率放大细分驱动器
在步进电机步距角不能满足使用的条件下,可采用细分驱动器来驱动步进电机,细分驱动器的原理是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机运转的。
二、驱动器
由于单片机的I/O不具有直接驱动步进电机的能力,故在本系统中需要步进电机驱动器,我们选择驱动器为KD-221,该驱动器具有输入电压范围广,控制信号输入方式多样等特点。其具体接法如下:
2.1、电源接线:
三、光电开关
1.
2.
3.
4.
5.
51系列单片机控制步进电机调速闭环系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)