多功能导盲车的系统实现
1.1 引言
随着社会的发展,盲人对独立生活和事业追求越来越强烈,但是要保证在车水马龙的城市生活中安全自如的活动就需要一个专门的导盲设备来进行辅助。因此我们就要设计一款多功能的导盲车来完成这份重任。
1.2 项目背景/选题动机
在实际生活中,我们遇到过一些独立生活的盲人,他们在出行方面面临着很大的问题,比如说他们在按盲道走的过程中,总会遇到各种障碍。因此,我们就想是否能够做出一款基于AVR MCU的导盲车来帮助他们解决这个问题,更好的独立生活。同时,在做这款车的过程中,我们也能学到关于AVR MCU的一些知识。AVR MCU是一个应用性比较广泛的产品,我们想如果能了解比较多的关于AVR MCU 的知识,应该会对我们以后的工作带来很大的益处。综上所述,我们想做一个基于AVR MCU的导盲车。
二、需求分析
2.1 功能要求
通过CMOS摄像头采集路况信息,经CPU处理判断前方是否有障碍物。若无,则车继续引导人前行;若有障碍物,则车发声报警。通过超声波传感器检测,如果可以越过则继续前进,如果无法越过,就停止。如果需要转弯,则减速转弯。同时导盲车上还有GPS导航系统,可以确切知道盲人所处位置。
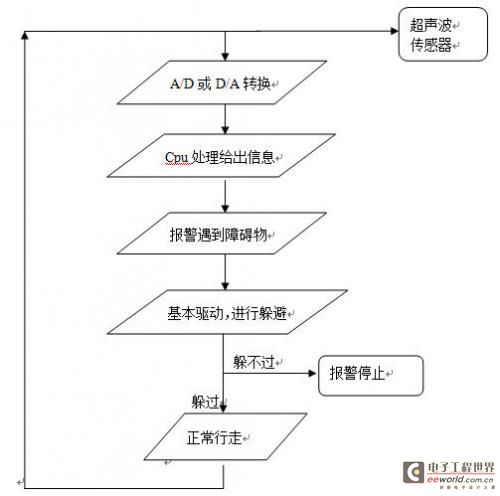
图1 系统架构
2.2 性能要求
1、精确度:在车寻线的过程中,不能偏离盲道,应准确的按盲道走。
2、稳定性:在导盲的过程中,不能轻易的发生死机。
3、安全性:在遇到危险的时候,能及时报警。
4、低功耗:AVR单片机在低功耗的方面是做的非常优秀的。选择AVR MCU可以实现低功耗的性能要求。
三、方案设计
3.1 系统功能实现原理
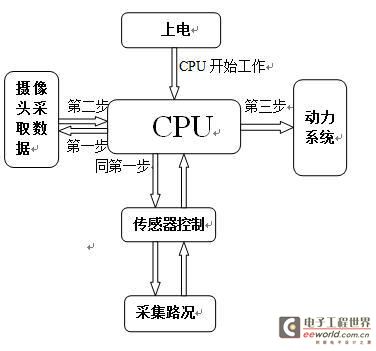
系统硬件结构框图
说明:上电之后,CPU开始工作。首先,CPU开始控制摄像头和传感器同时工作,同时采集信息,把采集回来的信息进行分析,在CPU内部进行A/D或D/A转换,然后将转换后的信息传递给舵机,使舵机在CPU的控制下进行工作。
3.2 硬件平台选用及资源配置
运用EVK1100开发板进行前期开发
3.3 系统软件流程
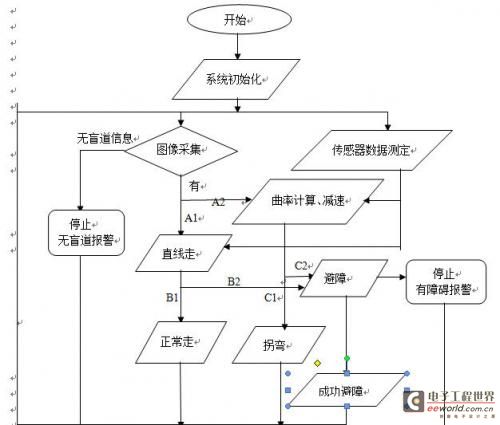
程序运行流程图
说明:A1无弯道,A2有弯道
B1无障碍物,B2有障碍物
C1拐弯,C2有障碍物
3.4 系统预计实现结果
本设计最终产品能够安全地指引盲人在盲道行走。它能够安全精确地寻找盲道并按照盲道行走以指引盲人行走。当遇到障碍物的时候,能够发出警报提醒盲人前方有障碍物,及时躲避。当盲人向其发出定位指令时,能够运用GPS模块,快速告知盲人具体位置。
MCU导盲车EVK1100AV 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)