PTR2000无线收发C语言程序
#include
#include
#defineucharunsignedchar
#defineuintunsignedint
#defineREQ_SEND 0x33
#defineREQ_RESEND 0x66
#defineSEND_OVER 0x99
//为简化起见,假设了7位固定的采集数据
#define DATA0 0x10
#define DATA1 0x20
#define DATA2 0x30
#define DATA3 0x40
#define DATA4 0x50
#define DATA5 0x60
#define DATA6 0x70
sbitTXEN=P2^0;
sbitCS=P2^1;
sbitPWR=P2^2;
voidClearT_buf();//清除t_buf函数
voidClearR_buf();//清除r_buf函数
voidDelay();//延时5ms
voidGetData();//采集数据
voidSend();//采集并发送函数
voidSendOver();//通知PC机发送结束函数
xdataucharFlag_Start=0;//开始接受数据标志位
xdataucharFlag_RSend=0;//请求发送标志位
xdataucharFlag_ReSend=0;//请求重发标志位
xdataucharFlag_Delay=1;//延时5ms标志
xdataucharData[7];//采集的7个字节数据
xdatauchartCount=0;
xdatauchart_buf[11];//1开始字节"$",1长度字节LEN,
//7字节数据,1校验和字节,
//1结束字节"*"
xdataucharrCount=0;
xdataucharr_buf[5];//1开始字节"$",1长度字节LEN,
//1字节指令,1校验和字节,
//1结束字节"*"
// 定时器0中断服务子程序
voidtimer()interrupt 1using2
{
Flag_Delay=0;
TH0=-5000/256;
TL0=-5000%6;
}
//串口中断服务子程序
voidserial()interrupt 4using1
{
RI=0;
//判断是否收到字符$,其数值为0x24,置开始接收标志位
if ((!Flag_Start)&&(SBUF==0x24))
{
Flag_Start=1;
}
if (Flag_Start)
{
if (rCount<5)
{
r_buf[rCount]=SBUF;
rCount++;
}
//判断是否收到字符*,其数值为0x2A,根据接收的指令设置相应标志位
if ((r_buf[rCount-1]==0x2A)|| (rCount==5))
{
rCount=0;
Flag_Start=0;
if (r_buf[2]==REQ_SEND)//收到“请求发送”指令
{
Flag_RSend=1;
}
if (r_buf[2]==REQ_RESEND)//收到“请求重发”指令
{
Flag_ReSend=1;
}
}
else
ClearR_buf();
}
}
//清除t_buf函数
voidClearT_buf(void)
{
ucharxdatai ;
for (i=0;i++;i<11)
{
t_buf[i]=0;
}
}
//清除r_buf函数
voidClearR_buf(void)
{
ucharxdatai ;
for (i=0;i++;i<5)
{
r_buf[i]=0;
}
}
//延时函数
voidDelay(void)
{
TR0=1;
ET0=1;
while(Flag_Delay);
ET0=0;
TR0=0;
Flag_Delay=1;
}
//采集数据函数经过简化处理,取固定的7个字节数据
voidGetData(void)
{
Data[0]=DATA0;
Data[1]=DATA1;
Data[2]=DATA2;
Data[3]=DATA3;
Data[4]=DATA4;
Data[5]=DATA5;
Data[6]=DATA6;
}
//单片机端发送数据函数
voidSend(void)
{
ucharxdataj =0;
ucharxdatalen =0;
ucharxdataCheckSum=0;
t_buf[0]=0x24;//起始位
t_buf[1]=0x07;//7个数据字节
len=t_buf[1];
CheckSum=CheckSum+len;
for (j=0;j++;j
t_buf[j+2]=Data[j];
CheckSum=CheckSum+t_buf[j+2];
}
t_buf[9]=CheckSum;//校验和字节
t_buf[10]=0x2A;//停止位
for (j=0;j++;j<11)
{
TI=0;
SBUF=t_buf[j];
while(TI==0);
TI=0;
}
}
//通知PC机端发送结束函数
voidSendOver(void)
{
TI=0;
SBUF=0x24;
while(TI==0);
TI=0;
SBUF=0x01;
while(TI==0);
TI=0;
SBUF=SEND_OVER;//通知PC机端“发送结束”
while(TI==0);
TI=0;
SBUF=0x99;//校验字节
while(TI==0);
TI=0;
SBUF=0x2A;
while(TI==0);
TI=0;
}
voidmain(void)
{
ClearT_buf();
ClearR_buf();
TXEN=0;//初始为接收状态
PWR=1;//正常工作模式
CS=0;//选择通道0
EA=0;
//11.0592MHz,9600波特率,工作方式1,8数据位,1停止位,无奇偶校验
TMOD=0x21;
SCON=0x50;//串行口工作方式1,REN=1
PCON=0x00;//SMOD=0
TL1=0xfd;
TH1=0xfd;
TR1=1;//定时器1开始计时
PT0=1;//定时器0高优先级
TH0=-5000/256;//5ms
TL0=-5000%6;
IE=0x90;//EA=1,ES=1
while(1)
{
if (Flag_RSend)//“请求发送”指令
{
TXEN=1;//改变为发射状态
Delay();//延时5ms
GetData();//采集数据
Send();//发送
Flag_RSend=0;
SendOver();//通知PC机发送结束
TXEN=0;//重设为接收状态
}
elseif (Flag_ReSend)// “请求重发”指令
{
TXEN=1;//改变为发射状态
Delay();//延时5ms
Send();//重发
Flag_ReSend=0;
SendOver();//通知PC机发送结束
TXEN=0;// 设为接收状态
}
}
}
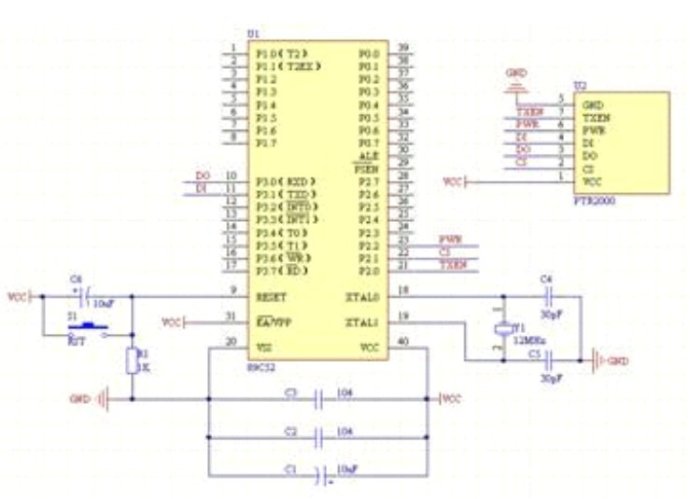
下面是原理图:
PTR2000无线收发C语言程 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)