华为工程师带你解密5G与车联网
级和替换。
自动驾驶需要通过V2X传输什么信息?
如上文所述可知,由V2X使能的自动驾驶场景中,各种决策还是来自车辆本身。这一点决定了在车联网这个环境里车本身是个独立的决策主体,即使是车连上了网或者连成了网。这个结果是由两个事实决定的:
第一,车主不会希望将自己的安危交给其它车或者第三方决定。周边车提供的信息只是给本车做参考用。最终的决策还是在本车实现。周边车辆的指令信息,特别是类似于"前车指令后车刹车"等决策信息是不会被本车直接采信的,此类信息必须是经过几层过滤,和本车上传感器的信息对比以后才会由本车决定采纳或拒绝。
第二,从商业角度考虑,车厂之间是互为竞争关系的,而且会有意识的凸显不同品牌之间的差异性,自动驾驶的性能好坏也是体现差异性的特征之一。基于V2X的自动驾驶功能,对应的决策算法,硬件上比如天线数的差异性,都是体现品牌优越性的手段。所以车厂不会愿意把决策机制和算法分布到不同厂家的车上,甚至不愿意分布到自己高端和低端品牌的车上。
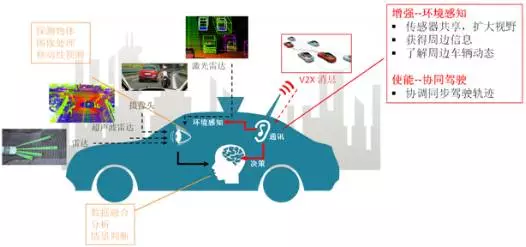
因此V2X之于自动驾驶,需要传递和交互的不会是最终抉择指令,只会是是周边车辆与环境的状态信息。例如在超车等场景下需要周边车辆的传感器信息共享,并道等场景下需要周边车辆驾驶操作状态信息分享。这也符合前面所述V2X之于自动驾驶是一种"拉长"的传感器的定位。
本质上无论哪种应用场景,需要V2X传递的信息其实就是这两种:传感器信息共享与周边车辆驾驶操作状态信息分享。可以说,所有的V2X自动驾驶消息都是这两种信息的不同表达形式。
另外,自动驾驶的单车决策模式也可以导出另外一个事实:
V2X的通信模式会以多播广播通信模式为主,以此更高效的分享周边的信息,而不是传统意义上的基于应答确认式的单播点对点通信方式(unicast)。
自动驾驶的1毫秒延时意味着什么?
3GPP定义了若干个1毫秒到几个毫秒的低时延场景,主要集中在自动驾驶上。自动驾驶中制动等反应时间,是个系统响应时间,其中包括了给网络云端计算处理、车间协商处理的时间,也包括了车辆本身系统计算及制动处理时间。如果要做到100km制动距离不超过30cm,那么系统整体响应时间不能超过10毫秒,而人类最好的F1车手的反应时间在100毫秒左右。从保障安全的角度,系统响应时间当然越低越好,其中对通讯时延的要求会更高。未来5G网络能够在提供99.999%稳定性的同时做到小于1毫秒的通讯时延,则自动驾驶车辆的低时延场景更需要系统其它环节的配合来实现。
仔细分析这些自动驾驶的场景就会发现,现有技术下自动驾驶操作本身所需的时间,包括数据采集,分析,算法决策,机器传动,都远远大于1毫秒。通讯所带来的时延在整个时间链里占的比例是非常小的。另外,外部环境的变化对车辆系统时延的影响也远大于1毫秒,比方说,雨雪天路面对刹车制动的影响都在几秒到几十秒以上。因此从整体上考虑,是应该投入大量资源苛求V2X现阶段在超低时延通讯上得到突破,还是致力与改进其它环节,比方说把图像处理时延从100毫秒降到90毫秒,答案是显而易见的。
因此在现阶段,端到端的低时延更取决于传感器、处理器、算法及机器传动的改进。而在超低时延的5G网络规模部署后,相信更先进的通讯技术会给车企带来更多的创新,让车辆更加安全。
自动驾驶最需要什么?V2V还是V2N?
回答这个问题要从两个维度上分析。
一个是技术维度:自动驾驶的基本要求是V2V的通讯必须随处可用,包括没有网络覆盖的环境,所以V2V的直联是V2X的基本功能。IEEE下面有IEEE 802.11p(DSRC),LTE下面有 LTE-V PC5,都支持V2V直联。许多自动驾驶场景下( 如编队行驶、并道等),因为收发车辆的距离近,V2V的直联是更好的通讯模式。
另一个是商业维度,这个最终决定了V2X是否能被成功部署。一直以来,车企担心依赖蜂窝技术的V2X会导致自动驾驶业务被电信运营商所控制,所以V2V直联也会是车厂的首选。
然而,完全没有网络辅助的V2V在拥塞,干扰管理和覆盖上有很多的问题。这些缺陷在IEEE 802.11p的系统分析上已经多次被验证了。比较可行的解决方案是在提供V2V直连通讯能力的同时,由蜂窝网络提供辅助,通过V2N的通讯大幅疏解热点地区的通讯压力,保障车联网通讯稳定性。
V2N同时可以用于地图更新,交通管理,以及提供一定距离以外的路况环境等信息。此外,车厂也希望能通过V2N收集车辆的驾驶和传感器信息,在网络中进行大数据分析,这更接近于5G的mMTC(海量物联网通信)
- 基于蜂窝网络的车联网通信技术比较(06-14)
- 物联网网关关键技术和应用方向(08-20)
- 华为进军车联网以技术激活市场(12-05)
- 超高频RFID车联网系统研究(01-13)
- 从4G到V2V 车联网还需要哪些通信协议?(07-02)
- RF技术使汽车子系统轻松互联(11-23)