PIC单片机的时钟模式
时间:11-28
来源:互联网
点击:
任何一个单片机要工作都需要一个时钟使单片机按给定的时钟节拍一步一步的执行程序。对于这样一个时钟,在PIC单片机上有多种工作配置方式,比起传统的51系列单片机,其时钟模式得到了极大的丰富,然而这给初学者带来了一定的困难。
单片机标准时钟模式:用石英晶体或陶瓷振荡器产生工作时钟,如图1所示。
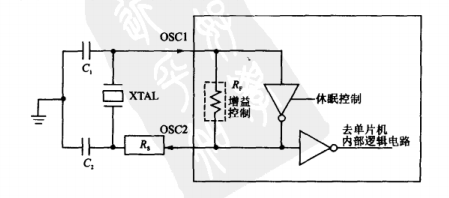
图1
与普通单片机相比,PIC晶体振荡模式的最大特点是内部振荡电路放大器的增益是可调的。如图1,Rf为增益调节电阻。主要原因是不同振荡频率的晶体,为保证其可靠振荡而所需的激励功率是完全不一样的。按常规,振荡器频率越低,其所需的激励功率越小。
如果振荡器输出给晶体的激励功率不符合晶体自身的工作特性要求,可能就会有以下两种结果出现:
1、激励功率过大,振荡波形就会发生畸变,晶体可能会震到其高次谐波上去,更糟糕的是晶体可能会被震碎(如音叉型的32768Hz晶体);
2、激励过小,晶体起振困难,起振时间很长,长时间工作还可能出现停振现象等等。
PIC振荡电路的这种可调增益使用户能够灵活合理地配置其设计的晶体振荡电路。PIC有三种增益模式:
要强调,作为设计者在选择恰当的振荡模式时不能机械的按表查找,不同厂家生产的晶体品质差异较大。同样是4MHz的晶振,有的配置成XT模式即能正常工作,有的需要配制成HS才稳定可靠。
单片机标准时钟模式:用石英晶体或陶瓷振荡器产生工作时钟,如图1所示。
图1
与普通单片机相比,PIC晶体振荡模式的最大特点是内部振荡电路放大器的增益是可调的。如图1,Rf为增益调节电阻。主要原因是不同振荡频率的晶体,为保证其可靠振荡而所需的激励功率是完全不一样的。按常规,振荡器频率越低,其所需的激励功率越小。
如果振荡器输出给晶体的激励功率不符合晶体自身的工作特性要求,可能就会有以下两种结果出现:
1、激励功率过大,振荡波形就会发生畸变,晶体可能会震到其高次谐波上去,更糟糕的是晶体可能会被震碎(如音叉型的32768Hz晶体);
2、激励过小,晶体起振困难,起振时间很长,长时间工作还可能出现停振现象等等。
PIC振荡电路的这种可调增益使用户能够灵活合理地配置其设计的晶体振荡电路。PIC有三种增益模式:
| 振荡模式 | 增益量 | 适用器件 | 参考振荡频率范围 |
| LP | 最低 | 低频晶体 | <200kHz |
| XT | 适中 | 晶体/陶瓷谐振器 | 100kHz~4MHz |
| HS | 最高 | 高速晶体/陶瓷谐振器 | >2MHz |
要强调,作为设计者在选择恰当的振荡模式时不能机械的按表查找,不同厂家生产的晶体品质差异较大。同样是4MHz的晶振,有的配置成XT模式即能正常工作,有的需要配制成HS才稳定可靠。
PIC单片机时钟模 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)