直角坐标机器人在小型立体仓库中的应用
时间:12-20
来源:互联网
点击:
一、引言
在全自动档案存期系统,全自动售药机,全自动保管箱存取系统和其它一些小型立体仓库应用中都采用直角坐标机器人作为取出,存放和搬运机构。其中小型立体仓库主要是存储小体积的物品,这些物品通常放置在朔料箱里或外形统一的纸箱里等规范统一的容器里。但很多小型立体库还用来存放相同的产品,半成品和部件,如太阳能板,汽车配件等。机器人可以对每个箱或每个部件进行自动取出及放置到出货口,也可以把出货口的箱子托取住和放置到货架对应的位置上。与常见的,安装在车间的大型立体仓库不同,小型立体仓库主要安放在办公楼内,要求体积小,存储密度大,占地少和工作噪声低等。有很多用户为了保证噪声低,还严禁使用气动原件。本文就以沈阳莱茵机器人的小型立体仓库项目为例来简单介绍。
二、 小型立体仓库的主要组成部分
档案管理存储类立体仓库主要被装在办公楼内,教学类立体仓库也主要放在教室内,而模具存储类,标准件存储类立体仓库主要放置在车间内。随应用场合不用,其结构有小的区别。下面就以存储朔料箱的立体库为例进行介绍。这类立体库主要由货架,朔料箱,放货出货处和取放搬运机器人组成。图1是沈阳莱茵机器人德国合作伙伴Berger Lahr公司的多货架和单货架两种小型立体库。我们为用户所设计的立体库也是借鉴百格拉的成功案例及得到他们的帮助,特别是抓取部分。图2是沈阳莱茵机器人为一用户设计制造的1000箱银行保管箱自动存取系统和为一客户设计的太阳能板自动存储系统。尽管各家的小型立体库有区别,但主要部分都类似,下面就对各个主要部分进行简单的介绍。
对两个货架面对面放置的立体库其搬运机器人是典型的二维XZ机器人,而超过两个货架就要采用图1中左图所示的三维机器人。本文仅介绍双货架的立体库所配的二维机器人。其二维XZ机器人与图2中左图所采用的机器人结构形式几乎完成一样。但要根据搬运物体重量,立体库的大小,工作节拍来选择对应的直角坐标机器人。比如搬运100~120公斤负载(框+零件最大重量)的机器人其上下两根X轴就要采用RSL170型直线运动单元,两根并列Z轴采用RSL90D直线运动单元。比如搬运30~80公斤负载(框+零件最大重量)的机器人其上下两根X轴就要采用RSL90D型直线运动单元,两根并列Z轴采用RSL90直线运动单元。
图3中药架的各个放药处是均匀的,其宽度和高度是固定的。实际的药架里每个格的宽度和高度可以不同。药架放置药的位置数量也是按医院大小来设计的。药架可以是倾斜15度角的,也可以类似书架水平的。药架要与机器人结构相对应。
3、 机器人手爪
在小型立体仓库项目中莱茵机器人根据用户要求设计了四种手爪,手爪工作的稳定性,可靠性非常重要,详细资料请联系沈阳莱茵机器人。下面对三种手爪分别简单介绍。
1) 托起式
这类三层伸缩式手爪是用来抓取朔料箱产品类产品。工作时手爪伸入到箱子底下,然后升高使箱子离开货架。然后手爪回收把箱子运送到手爪托架中心。该类手爪又分两种。一种是靠整个手爪任意转动来完成箱子在不同方向货架上的任意存取。令一类是靠可以向前后两个方向伸缩来完成箱子在不同方向货架上的任意存取。
2) 钩拉式
在银行保管箱自动存取设备中,莱茵机器人为用户设计了可以双向钩拉式手爪。其工作原理就是手爪伸到箱子底部,然后钩子上升把箱子钩住,然后拉到手爪中间。该类手爪可以从前后两个方向实现抓取和存放操作。
3) 夹拉式
这类手爪在汽车电池快速更换系统中被广泛使用。它主要是通过两侧的夹板把箱子夹住,同时通过夹板上转动链条带动把箱子转送出来。要求箱子强度好,体积完全相同。
4) 吸夹式
这类手爪主要为自动售药机设计的,工作时小型吸盘对准药盒后运动到药盒表面。然后通过吸盘吸住药盒及拉回到手爪托盘中间。两边的夹板自动夹紧药盒,以防运动过程中药盒发生位移。
4、 放货口
随要存储物体用处不同,放货口也不同。对朔料箱类的立体库就采用与传统立体库相同的出货口。而自动售药机的出药口和银行保管箱的出货口也不完全一样,这里不进行详细介绍,要了解详细资料请联系沈阳莱茵机器人。
5、 控制系统
最高端控制系统是工控机,主要用来进行管理和统计工作。而运动控制系统是触摸屏和西门子PLC。一些简单的运动莱茵机器人采用德国BergerLahr公司的智能步进电机系统。这类智能步进电机系统通过编程和IO口可以完成特定的动作,对简化设备结构,减少布线,简化PLC程序非常有意义。
6、 安全防护措施
安全防护措施是所有机器人系统最重要部分,我们采取机械限位,传感器信号和位置信息互锁,软限位,安全门锁等措施及它们的有机组合。
三、 结论
借助德国Berger Lahr公司的一些成果案例,莱茵机器人为国内用户成功设计制造了档案存储系统,全自动售药机,银行全自动保管箱系统,太能能板存储系统,模具存储库等。与不同用户及行业的接触,我们深深感受到用户对机器人渴望和担忧。用户非常担心机器人的稳定性,担心机器人能否长期可靠地工作。比如全自动保管箱和全自动售药机能否10年内无故障工作。莱茵机器人采用高质量,高品质的配件。比如减速机仅采用德国Neugart公司的精密行星减速机,驱动伺服产品通常采用德国Berger Lahr公司或LUST公司的高端产品。另外光电传感器和低压电器采用施耐德或德国产品,控制系统采用西门子PLC,气动元件采用德国FESTO产品。机器人的安全措施非常重要,莱茵机器人采取机械限位,光电传感器信号互锁,软件限位,多急停按钮和安全锁等多级安全措施,确保所生产制造的机器人系统长期,稳定,可靠,低噪声,高速地工作。(end)
在全自动档案存期系统,全自动售药机,全自动保管箱存取系统和其它一些小型立体仓库应用中都采用直角坐标机器人作为取出,存放和搬运机构。其中小型立体仓库主要是存储小体积的物品,这些物品通常放置在朔料箱里或外形统一的纸箱里等规范统一的容器里。但很多小型立体库还用来存放相同的产品,半成品和部件,如太阳能板,汽车配件等。机器人可以对每个箱或每个部件进行自动取出及放置到出货口,也可以把出货口的箱子托取住和放置到货架对应的位置上。与常见的,安装在车间的大型立体仓库不同,小型立体仓库主要安放在办公楼内,要求体积小,存储密度大,占地少和工作噪声低等。有很多用户为了保证噪声低,还严禁使用气动原件。本文就以沈阳莱茵机器人的小型立体仓库项目为例来简单介绍。
二、 小型立体仓库的主要组成部分
档案管理存储类立体仓库主要被装在办公楼内,教学类立体仓库也主要放在教室内,而模具存储类,标准件存储类立体仓库主要放置在车间内。随应用场合不用,其结构有小的区别。下面就以存储朔料箱的立体库为例进行介绍。这类立体库主要由货架,朔料箱,放货出货处和取放搬运机器人组成。图1是沈阳莱茵机器人德国合作伙伴Berger Lahr公司的多货架和单货架两种小型立体库。我们为用户所设计的立体库也是借鉴百格拉的成功案例及得到他们的帮助,特别是抓取部分。图2是沈阳莱茵机器人为一用户设计制造的1000箱银行保管箱自动存取系统和为一客户设计的太阳能板自动存储系统。尽管各家的小型立体库有区别,但主要部分都类似,下面就对各个主要部分进行简单的介绍。
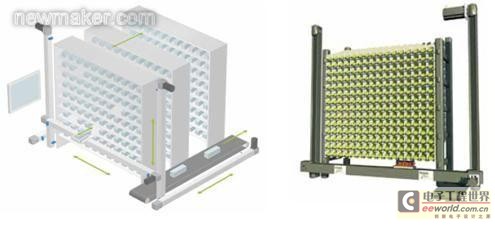
图1:Berger Lahr多货架立体库和单货架立体库。

图2:左图是莱茵机器人设计制造的1000箱全自动保管箱系统,右图是为用户设计的太阳能板自动存储库。
对两个货架面对面放置的立体库其搬运机器人是典型的二维XZ机器人,而超过两个货架就要采用图1中左图所示的三维机器人。本文仅介绍双货架的立体库所配的二维机器人。其二维XZ机器人与图2中左图所采用的机器人结构形式几乎完成一样。但要根据搬运物体重量,立体库的大小,工作节拍来选择对应的直角坐标机器人。比如搬运100~120公斤负载(框+零件最大重量)的机器人其上下两根X轴就要采用RSL170型直线运动单元,两根并列Z轴采用RSL90D直线运动单元。比如搬运30~80公斤负载(框+零件最大重量)的机器人其上下两根X轴就要采用RSL90D型直线运动单元,两根并列Z轴采用RSL90直线运动单元。

图3中左图是带转动功能的手爪和Z轴照片,中图是手爪和Z轴照片。
右图是XZ直角坐标机器人,Z轴滑块带动3个上药料道,药架里每个格的宽度和高度可以不同。
图3中药架的各个放药处是均匀的,其宽度和高度是固定的。实际的药架里每个格的宽度和高度可以不同。药架放置药的位置数量也是按医院大小来设计的。药架可以是倾斜15度角的,也可以类似书架水平的。药架要与机器人结构相对应。
3、 机器人手爪
在小型立体仓库项目中莱茵机器人根据用户要求设计了四种手爪,手爪工作的稳定性,可靠性非常重要,详细资料请联系沈阳莱茵机器人。下面对三种手爪分别简单介绍。
1) 托起式
这类三层伸缩式手爪是用来抓取朔料箱产品类产品。工作时手爪伸入到箱子底下,然后升高使箱子离开货架。然后手爪回收把箱子运送到手爪托架中心。该类手爪又分两种。一种是靠整个手爪任意转动来完成箱子在不同方向货架上的任意存取。令一类是靠可以向前后两个方向伸缩来完成箱子在不同方向货架上的任意存取。
2) 钩拉式
在银行保管箱自动存取设备中,莱茵机器人为用户设计了可以双向钩拉式手爪。其工作原理就是手爪伸到箱子底部,然后钩子上升把箱子钩住,然后拉到手爪中间。该类手爪可以从前后两个方向实现抓取和存放操作。
3) 夹拉式
这类手爪在汽车电池快速更换系统中被广泛使用。它主要是通过两侧的夹板把箱子夹住,同时通过夹板上转动链条带动把箱子转送出来。要求箱子强度好,体积完全相同。
4) 吸夹式
这类手爪主要为自动售药机设计的,工作时小型吸盘对准药盒后运动到药盒表面。然后通过吸盘吸住药盒及拉回到手爪托盘中间。两边的夹板自动夹紧药盒,以防运动过程中药盒发生位移。
4、 放货口
随要存储物体用处不同,放货口也不同。对朔料箱类的立体库就采用与传统立体库相同的出货口。而自动售药机的出药口和银行保管箱的出货口也不完全一样,这里不进行详细介绍,要了解详细资料请联系沈阳莱茵机器人。
5、 控制系统
最高端控制系统是工控机,主要用来进行管理和统计工作。而运动控制系统是触摸屏和西门子PLC。一些简单的运动莱茵机器人采用德国BergerLahr公司的智能步进电机系统。这类智能步进电机系统通过编程和IO口可以完成特定的动作,对简化设备结构,减少布线,简化PLC程序非常有意义。
6、 安全防护措施
安全防护措施是所有机器人系统最重要部分,我们采取机械限位,传感器信号和位置信息互锁,软限位,安全门锁等措施及它们的有机组合。
三、 结论
借助德国Berger Lahr公司的一些成果案例,莱茵机器人为国内用户成功设计制造了档案存储系统,全自动售药机,银行全自动保管箱系统,太能能板存储系统,模具存储库等。与不同用户及行业的接触,我们深深感受到用户对机器人渴望和担忧。用户非常担心机器人的稳定性,担心机器人能否长期可靠地工作。比如全自动保管箱和全自动售药机能否10年内无故障工作。莱茵机器人采用高质量,高品质的配件。比如减速机仅采用德国Neugart公司的精密行星减速机,驱动伺服产品通常采用德国Berger Lahr公司或LUST公司的高端产品。另外光电传感器和低压电器采用施耐德或德国产品,控制系统采用西门子PLC,气动元件采用德国FESTO产品。机器人的安全措施非常重要,莱茵机器人采取机械限位,光电传感器信号互锁,软件限位,多急停按钮和安全锁等多级安全措施,确保所生产制造的机器人系统长期,稳定,可靠,低噪声,高速地工作。(end)
角坐标机器立体仓 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)