高压电源之全桥控制策略
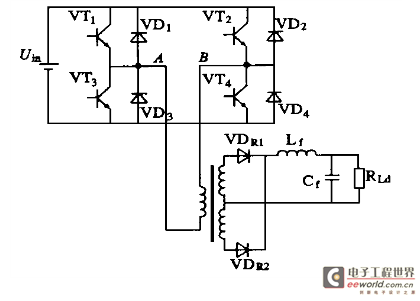
上图所示全桥电路结构,基本原理为:直流电压Uin经过VT1、VD1~VT4、VD4组成的全桥开关变换器,在Tr初级得到交流方波电压uAB,经变压器升压或降压,再由输出整流桥变换成直流方波,最后通过电感Lf、电容Cf组成的滤波器,在Cf上得到平直的直流电压。
全桥DC/DC变换器有四种控制策略,分别是双极性控制方式、有限双极性控制方式、不对称控制方式以及移相控制方式。
在了解上述4种工作方式前,先了解两个关键字,zvs和zcs。
pwm控制开关管工作在硬开关模式下,即开/关过程中电压下降/上升和电流上升/下降波形有交叠。此种方式效率低,对开关管损耗大。所以为了解决这个问题,出现了所谓零电压开关(ZVS)/零电流开关(ZCS)技术,电压电流不交叠,即软开关技术。
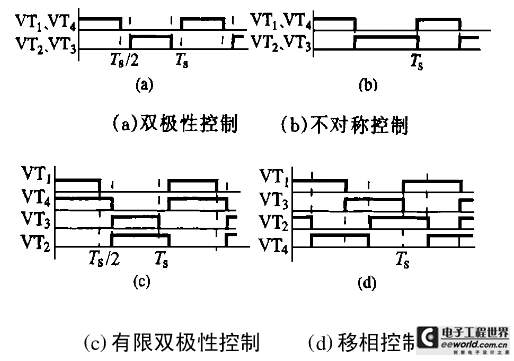
双极性控制方式为:开关管VT1和VT4、VT2和VT3同时开通和关断,其开通时间不超过半个开关周期,即它们的开通角小于180度。
属于基本控制方式,通过调节脉宽来调节输出电压,开关管工作在硬开关状态,工作时须采用缓冲电路吸收尖峰电压。
有限双极性控制方式为:有限双极性控制方式正半周期中,VT4一直开通,VT1只开通一段时间;负半周期中,VT2一直开通,VT3只开通一段时间。VT1 和VT3分别在VT4和VT2之前关断。定义VT1、VT3组成的桥臂为领先桥臂,VT2、VT4组成的桥臂为滞后桥臂。
这种方式实现了领先桥臂的零电压开关,和滞后桥臂的零电流开关,从而降低功耗。
不对称控制方式为:VT1和VT4和VT2和VT3同时开通和关断,与双极性方式不同的是VT1、VT4和VT2、VT3的开通和关断是互补的,即当 VT1、VT4开通时,VT2、VT3关断;VT1、VT4关断时,VT2、VT3开通。VT1、VT4的开通时间与VT2、VT3的不一样,因此uAB 正负半周的时间不一样。
这个电路在实现开关管ZVS的同时,有一个特别的优点,互补导通(但不是180°互补导通),之间没有死区时间,平直的输入电流有利于输入滤波器的设计。
移相控制方式为:每个桥臂的两个开关管180°互补导通,两个桥臂的导通之间相差一个相位,即所谓移相角。VT1、VT3的驱动信号分别领先于VT4、VT2,可以定义VT1、VT3组成的桥臂为领先桥臂,VT2、VT4组成的桥臂为滞后桥臂。
利用变压器的漏感和开关管的寄生电容实现ZVS,通过调节移相角来调节输出电压,有开关频率稳定,开关频率可高,元器件的电压和电流应力小。
下图为4种控制方式的波形示意图
四种全桥控制方式的优缺点:
双极性控制的缺点:1、尖峰大。2、损耗大。3、开关管需要很大的安全工作区。4、二极管的反向恢复也会造成很高的电压、电流尖峰和损耗。5、驱动电路不稳定,产生很大噪声。6、开关损耗限制了开关频率的提高,使动态特性降低,不利于滤波器的小型化。
有限双极控制的缺点:1、IGBT一般承受很高的反向电压,而且可能反向雪崩击穿。2、IGBT要承受很高的正向电压。3、没有充分利用漏感能量,使其消耗在雪崩击穿的IGBT中,造成IGBT功耗较大。4、因有一对开关管是ZVS,因而仍存在电流拖尾,限制了开关频率的提高。
不对称控制的缺点:1、需要隔直电容。2两对开关管的电流应力不一样,不利于统一选择开关管。3、需要电感,,这个电感一直流动着一个直流电流,电感中存在损耗。4、存在占空比丢失现象。
移项控制的缺点:1、存在占空比丢失。2、开关管的电流峰值增加。3、次级整流桥的耐压值增加。
从实现变换装置小型化和轻量化的角度来看,在四种控制方式中,双极性控制方式和不对称控制方式不大适用于中、大功率应用场合。有限双极性控制方式和移相控制方式具有更多的优越性,是中、大功率应用场合的理想控制方式。
所以这次的电源应该选择有限双极性控制方式或者是移项控制方式。看波形,我还是倾向于移项控制方式。接下来需要了解一下软开关,zvs和zcs,还有移相控制。
高压电源全桥控 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)