CAN标定基础——CCP与XCP
CCP协议(CAN Calibration Protocol)
CAN标定协议,基于CAN总线的标定协议
XCP协议(Universal Measurement and Calibration Protocol)
通用测试标定协议
可以应用在许多总线上:
XCP on CAN
XCP on Ethernet
XCP on FlexRay
XCP on USB

XCP/CCP主要应用于控制系统的开发和测试
XCP/CCP使用者为control system或mechanical engineers
XCP/CCP也广泛应用于system verification和testing
如果不用XCP/CCP,那么在ECU的软件开发中,将非常频繁使用C-code编译器和debugger。
通过XCP/CCP协议,配合A2L文件,可以直接在软件上更改某些参数,执行器就会给相应的反馈。
例如我们以前做一个单片机板子,如果想要修改里面的程序的话,需要先修改代码,再进行编译调试,生成hex或S19文件,再将程序烧写进单片机中,才算完成程序的修改。但是对于复杂的ECU来说,标定时是需要经常修改各种参数的,如果每次修改参数都需要编译调试生成再下载这一系列步骤的话,是非常影响工作效率的,所以使用CCP和XCP进行标定是非常便捷的。
1、当ECU运行的时候,可以实时记录ECU内存中的变量。
2、可以具有真实物理意义和单位的数值来直接读写ECU变量,比如RPM、温度、开关等,而不是以原始的字节、位来读取。
3、实时改变ECU内存中的变量值,测试中实时改变ECU行为和性能,而不需重新编译ECU程序。
4、标定过程中,数据记录功能可以获取和记录全面的数据。
CCP全称CAN Calibration Protocol(CAN标定协议),是ASAM标准的组成部分,属于ASAM MCD1a规范标准。
CCP协议主要可提供以下功能:
1、随机读取ECU中RAM和ROM数据
2、测量数据采样
3、标定数据采样和传输
4、同时处理多个ECU系统
5、F1ash编程技术
CCP协议采用主从通信方式,具体又可分为两种:
1、查询(Polling)模式
2、DAQ(Data Acquisition Command)模式
在详细介绍CCP的通信方式之前,我们需要先了解一下CCP的系统结构。
如下图所示为CCP系统的整体架构,标定系统和各个ECU通过CAN总线连接。
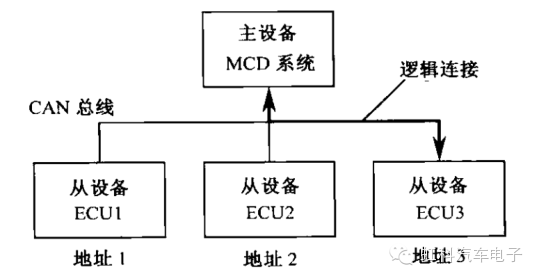
下图是CCP系统结构:

从CCP系统内部具体结构可以看出,CCP系统结构主要由主设备MCD系统和电控单元ECU构成,其中ECU内部的CCP驱动程序又由命令处理器和DAQ处理器组成。
命令处理器主要是处理查询模式,是由标定系统主设备给命令处理器发出一个CRO的命令,ECU接受到之后再反馈响应给标定系统。
DAQ处理器主要是处理DAQ模式的,DAQ模式不需要主设备请求,每隔一段时间它会自动将ECU里相关信息传到测量与标定系统中。
CAN标定基础CCP与XC 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)