感应式电机驱动方案
容易引起系统的机械共振,会在风机、洗衣机、水泵和空调中产生音频噪声。然而,这种控制器十分简单,便于实现,所以仍旧在不需要平滑力矩控制的场合中有所采用。
由于采用基于DSP和RISC的低成本控制器能够实现更为复杂的控制算法,因而另一种可选的无传感器控制方案近年来变得流行起来。“最新无传感器”控制允许以正弦电压和电流波形驱动永磁同步电机,并以电机电流的测量值为基础估计转子位置,该算法可以有效地提供恒定力矩,且没有前面提到的六拍控制器所带有的音频噪声问题。另外,该算法可以由新型控制器硬件结构实现,并且无需任何软件编码就能有效地实现复杂控制。专用集成设计平台的核心是最新的无传感器控制器,以围绕控制和功率电子元件的附加集成功能等难题为重点,伴随兼容芯片设计,可以完成该平台设计方法,其重点包括可以为数字控制芯片和功率级之间提供必要连接的三相逆变器驱动芯片和高压电流传感芯片。
无需软件的最新无传感器永磁同步电机控制
最新无传感器算法基于如图1所示的永磁同步电机的简化模型,电机绕组反电势波形为转子角度的正弦函数,因而能够用于测量转子角度。通过测量外加定子电压时流入定子线圈的电流可以计算反电势。为简化数学运算,可以利用 Clarke变换将三相电路变换为两相等效模型,这样就可以用转子角度的正弦和余弦函数表示反电势,其等效电路可以由以下方程描述:
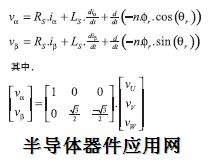
为提取转子角度,可以对反电势项进行积分以计算转子磁通,该磁通与速度无关。最后,由于正弦和余弦磁通项的比例与磁通的幅值无关,因而可用来精确估计转子的角度和速度。
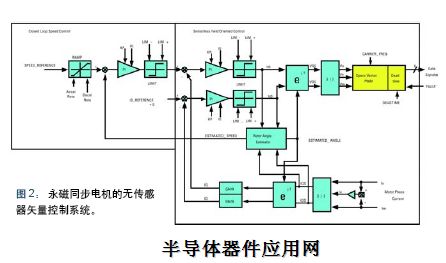
角度估计是实现控制算法的关键环节,不过,要实现图2中以结构图描述的控制系统仍需要许多其它功能。该控制器由一个速度外环和一个定子电流内环构成,可以分别产生参考力矩或者控制施加于绕组的电压。定子电流控制环由旋转参考坐标系中的磁场定向控制(Field Oriented Control,简称 FOC)技术实现,矢量以转子角度为函数旋转,将定子电流变换为两个准直流分量ID和IQ。IQ电流分量与转子磁通正交并产生力矩,其参考值来自速度环输出。ID电流与转子磁通对齐,可以增强或削弱转子磁通。在多数速度范围内ID给定值为零,不过,如果需要扩展到恒功率速度范围,则可以通过ID设定实现弱磁控制,这对于洗衣机等需要很高旋转速度的应用非常有用。
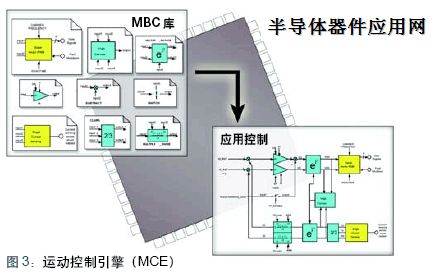
无传感器磁场定向控制算法能够以全新的控制器体系结构实现。图2中所示控制系统的每个功能都可以用硬件宏模块实现,而不是软件。诸如比例积分控制、矢量旋转和Clarke变换等功能可共用于所有交流电机控制系统。如图3所示,运动控制引擎(Motion Control Engine)库中包含交流电机控制模块和其它通用模块。获取电机控制芯片,就能够取得MCE库,以及模拟输入和空间矢量PWM控制等功能。开发人员可以使用图形工具将元件从MCE库拖入自己的控制系统设计,然后利用图形编译器将控制设计翻译为MCE序列指令,以正确顺序连接硬件宏模块从而实现自己的控制系统。该方法可以不必在开发过程中进行软件编码,既能节省时间,又能减少错误。
洗衣机电机的控制选择
精确控制滚筒转速对于控制滚筒式洗衣机和波轮式洗衣机的洗涤动作都十分重要。滚筒式洗衣机已经在欧洲使用了很多年,而且目前在北美也变得越来越流行起来。波轮式洗衣机要求衣物完全浸没于水中,而滚筒式洗衣机的摔打作用只需要在滚筒底部装水,这样可以显著降低用水量,并从根本上节约加热洗涤用水所需的能源。
在滚筒式洗衣机中,决定洗涤动作的关键因素是滚筒转速。滚筒的临界转速取决于滚筒半径,高于该转速时,衣物会贴在滚筒壁上;处于该转速时,旋转产生的离心力恰好与衣物的重力平衡;低于该转速时,衣物将贴在滚筒壁上,直到沿半径方向的重力分量超过离心力,一旦升至该角度,衣物就会坠落到滚筒底部。由于滚筒转速可决定衣物的洗涤力度,因而可以为精细织物选择轻柔的洗涤循环方式。在传统的波轮式洗衣机中,由使用齿轮箱和离合器的机械结构产生搅动作用,因而,引入转速控制系统不仅能够简化机械系统,而且能够控制洗涤循环。控制洗涤动作的转速和角度可以使系统设计人员更好地处理洗涤作用,从而开发出更节水的洗涤循环方式。
前面描述的许多电机转速控制选项都可以应用于洗衣机。欧洲的滚筒式洗衣机不使用交流电机,而是使用一种通用的“有刷”电机,而美国的洗衣机使用较大的滚筒尺寸,因而其电机的功率范围需超出通用电机方案。
虽然目前仍在使用三相感应式电机,但是近年来永磁同步电机正逐步成
感应式电机驱 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)