CAN总线局域元件的组成
1.CAN-BUS局域网的基本系统
汽车控制局域网(CAN)有若干个控制单元、CAN数据传输系统、K线(对于大众车系而言)组成,如图所示:主要有动力CAN总线、3个控制单元(ABS-ECU、AT-ECU、E-ECU)、检测线K线三大部分构成。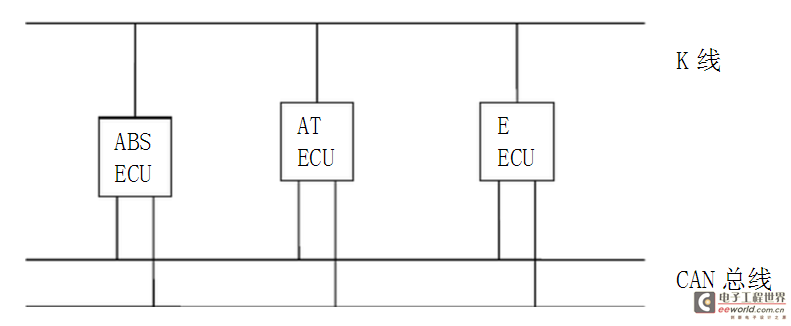
汽车控制局域网结构图 (图片来源于网络)
2 各部件的功能
(1)K线:
它是汽车工业当中广泛采用的一种通信总线标准,在许多场合都有着广泛的应用,在此系统中用于诊断时连结检测仪器。
(2)控制单元:
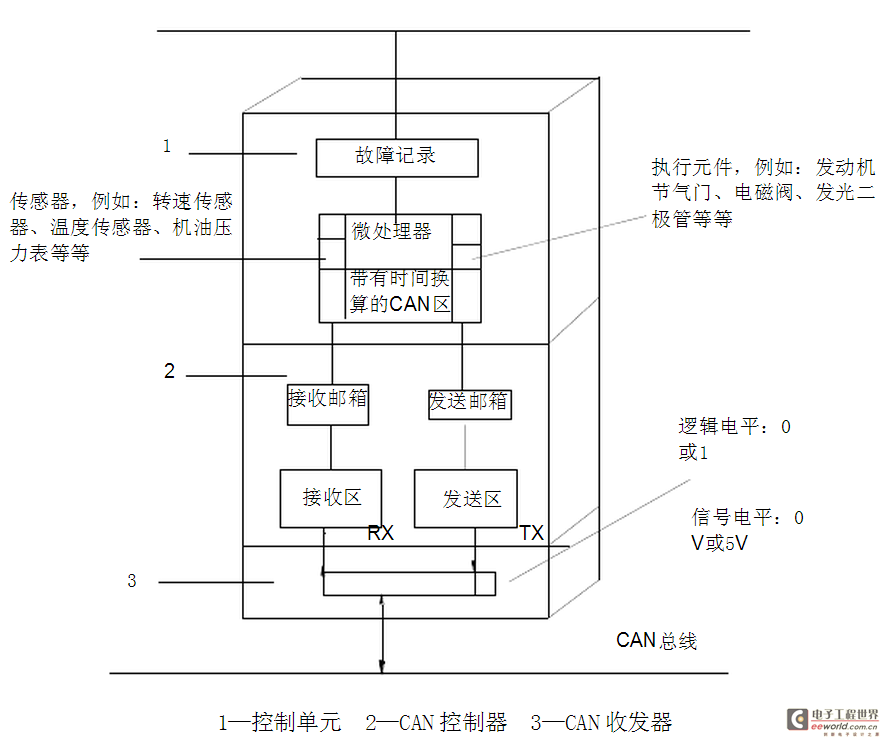
实现一种或多种控制规律的控制仪表或控制部件。简单地说,控制单元由微机和外围电路组成。而微机就是在一块芯片上集成了微处理器(CPU),存储器和输入/输出接口的单元。ECU的主要部分是微机,而核心件是CPU。控制单元将输入信号转化为数字形式,根据存储的参考数据进行对比加工,计算出输出值,输出信号再经功率放大去控制若干个调节伺服元件,例如继电器和开关等。如图所示,为汽车控制局域网结构图,其中1为控制单元。
汽车控制局域网结构图 (图片来源于网络)
它的工作过程首先是输入电路接受传感器和其它装置的输入信号,对信号进行过滤处理和放大,然后转换成一定伏特的输入电平。从传感器送到控制单元输入电路的信号既有模拟信号也有数字信号,输入电路中的模/数转换器可以将模拟信号转换为数字信号,传递给微机。微机将上述已经预处理过的信号进行运算处理,并将处理数据送至输出电路。最后输出电路将数字信息的功率放大,有些还要还原为模拟信号,使其驱动被控的调节伺服元件工作。
3、CAN数据传输系统:
一辆汽车不管有多少块电控单元,不管信息容量有多大,每块电控单元都只需引出两条线共同接在两个节点上,这两条导线就称作数据总线。以前各电控单元之间好比有许多人骑着自行车来来往往,现在是这些人乘坐公共汽车,公共汽车可以运输大量乘客,故数据总线亦称BUS线。
我们知道,汽车两块电脑之间的信息传递,有几个信号就要有几条信号传输线(信号传输线的接地端可以采用公共回路),例如,大众宝来轿车发动机电控单元J220与自动变速器电控单元J217之间就需要有5条信号传输线。如果传递信号项目越多,则需要更多的信号传输线,这样会导致电控单元针脚数增加、线路复杂、故障率增多及维修困难,采用了传输总线之后,只需要两根线就可以了。
(1)CAN数据传输系统构成
CAN数据传输系统中每块电脑的内部增加了一个CAN控制器,一个CAN收发器;每块电脑外部连接了两条CAN数据总线。在系统中作为终端的两块电脑,其内部还装有一个数据传递终端(有时数据传递终端安装在电脑外部)。
(2)各部件功能
①CAN控制器作用是接收控制单元中微处理器发出的数据,处理数据并传给CAN收发器,同时CAN控制器也接收收发器收到的数据,处理数据并传给微处理器。如图1-14所示,其中2为CAN控制器。
②CAN收发器是一个发送器和接收器的组合,如图2-2所示,其中3为CAN收发器。它将CAN控制器提供的数据转化成电信号并通过数据总线发送出去,同时,它也接收总线数据,并将数据传到CAN控制器中,为与TX线耦合的收发器。它的特点是TX线与总线耦合,这个耦合过程是一个断路是集流器电路来实现的。因此,总线导线就会出现以下两种状态:
状态1:截止状态,晶体管截止,开关未闭合,无源:总线电平为1,电阻高。
状态0:接通状态,晶体管导通,开关已闭合。有源:总线电平为0,电阻低。
如果总线处于状态1,那么此时状态可以有某一个与总线相连的控制单元使用状态0来改变,我们将有源的总线电平称为显性的,无源的总线电平称为隐性的。
③数据传递终端实际是一个电阻器,作用是避免数据传输终了反射回来,产生反射波而使数据遭到破坏。
④CAN数据总线
用以传输数据的双向数据线,分为CAN高位(CAN-high)和低位(CAN—low)数据线。数据没有指定接收器,数据通过数据总线发送给各控制单元,各控制单元接收后进行计算。为了防止外界电磁波干扰和向外辐射,CAN总线采用两条线缠绕在一起,如图所示,为CAN数据总线传输信号的示意图,两条线上的电位是相反的,如果一条线的电压是5V,另一条线就是0V,两条线的电压和总等于常值。通过该种办法,CAN总线得到保护而免受外界电磁场干扰,同时CAN总线向外辐射也保持中性,即无辐射。
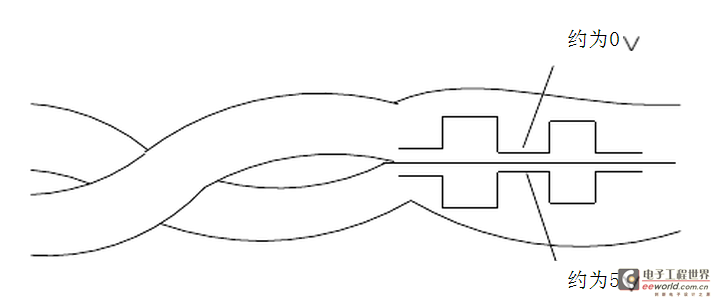
CAN数据总线传输信号的示意图